9月6日(日)に開催された「第6回ROSハッカソン」に行ってきました。ROS JAPAN Users Group が開催する6回目の勉強会です。

ros-jp
http://www.ros-users.jp/
ROS JAPAN Users Group とは日本内のROSに関する情報を集約することを目的に結成されたコミュニティです。
「ROSって何?」という方は、以下のページをご覧ください。
PepperがROSに正式対応!
http://www.softbank.jp/robot/news/developer/20150615a/
会場はおなじみのアルデバラン・アトリエ秋葉原。一部ではPepper開発の聖地と呼ばれています。
最初の発表は yoneken (@k_yone) さん。「ソフトとハードの交差点」というブログを運営されてます。
yonekenさんはROSに出会って、ROS Wikiの翻訳を行いました。
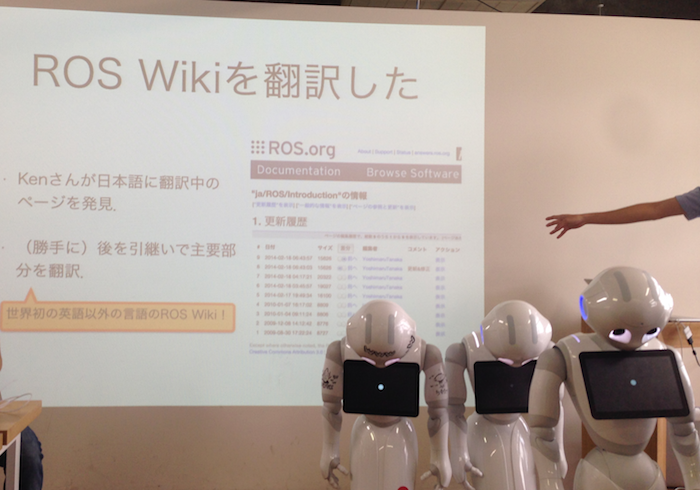
世界初の英語以外の言語のROS Wikiだったそうです。
ja – ROS Wiki
http://wiki.ros.org/ja
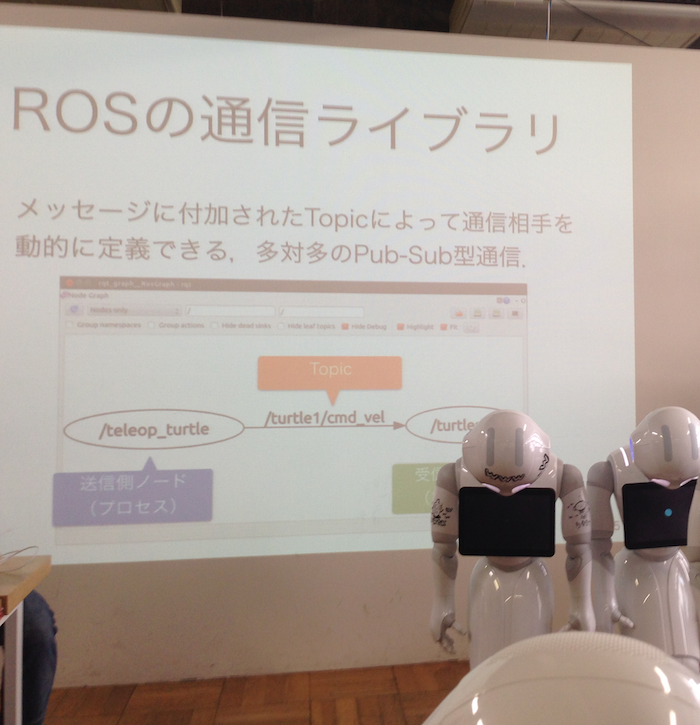
ROSの通信ライブラリのお話。
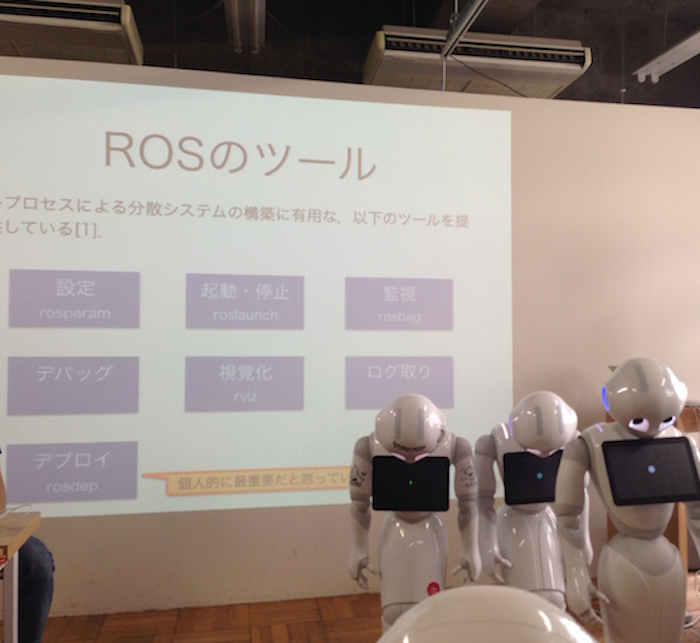
ROSのツールではいろいろある中で、デプロイを個人的に最重要と思っているそうです。
ROSの基盤は、ロボットの移動・操作・認識を中心とした多様なライブラリです。多くのロボットで必要とされる普遍的なデータ型を定義することで、ハードウェアとアルゴリズムを切り離したことが重要だそうです。

ROSはコミュニティーが以下のように全てオープンになっています。
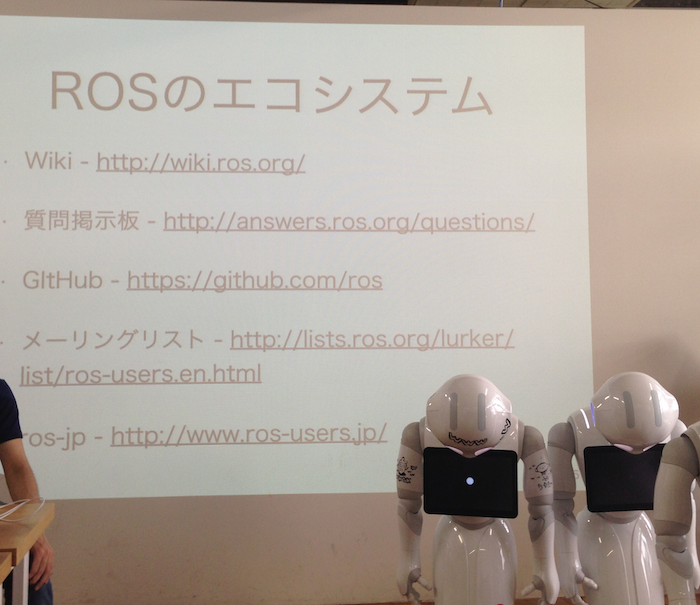
Wiki
http://wiki.ros.org/
質問掲示板
http://answers.ros.org/questions/
GitHub
https://github.com/ros
メーリングリスト
http://lists.ros.org/lurker/list/ros-users.en.html
ros-jp
http://www.ros-users.jp/
全てがオープンなので、各々が貢献していこうと思えるようになっているそうです。
続いて「PepperをROSで動かす」です。

まずは、Pepper開発者プログラムから登録を行い、
https://community.aldebaran.com/en/developerprogram
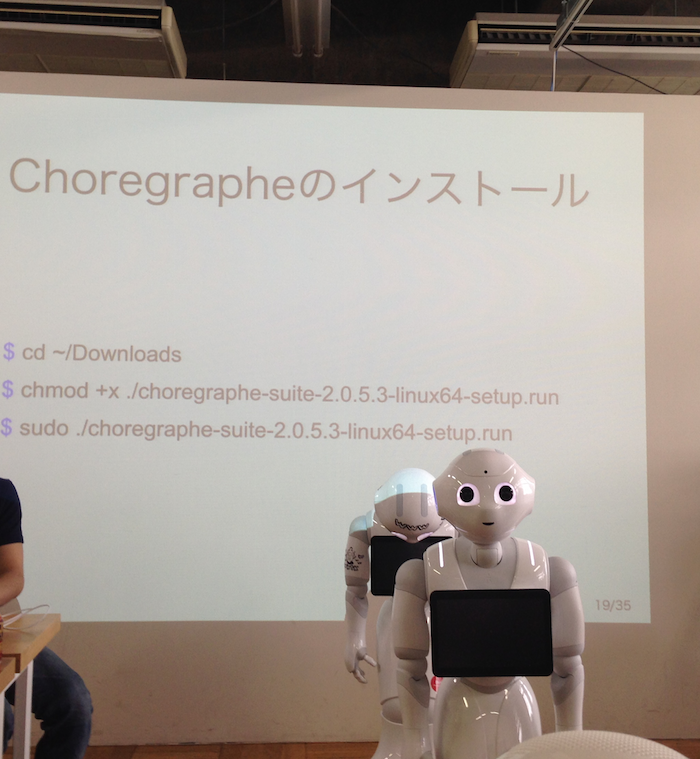
Pepper開発環境のChoregrapheをダウンロードします。
https://community.aldebaran.com/en/resources/software
続いて、以下を行っていきます。
・Choregrapheのインストール
・C++ SDKのインストール
・Python SDKのインストール
・ROSのPepperパッケージが依存しているパッケージのインストール
・ROSのPepperパッケージをインストール
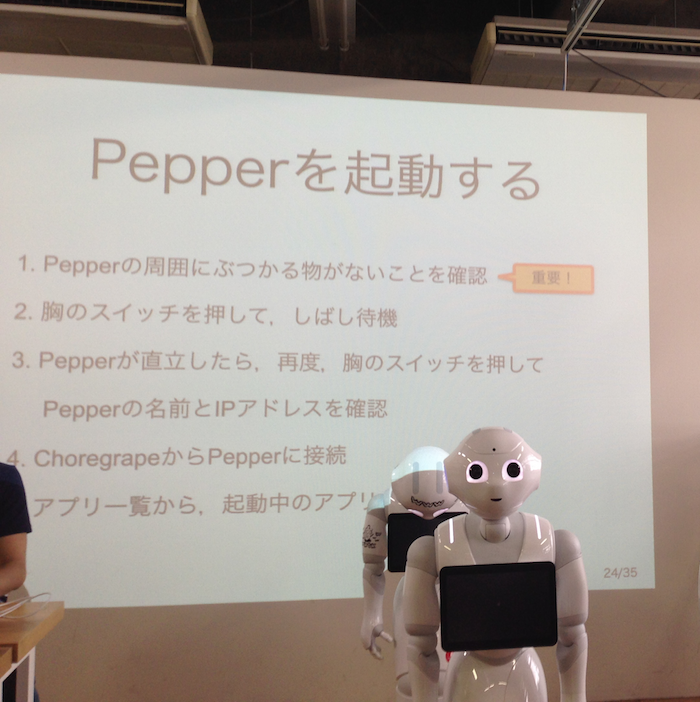
一通りのインストールが完了したら、Pepper実機の電源ボタンを押して起動してみます。
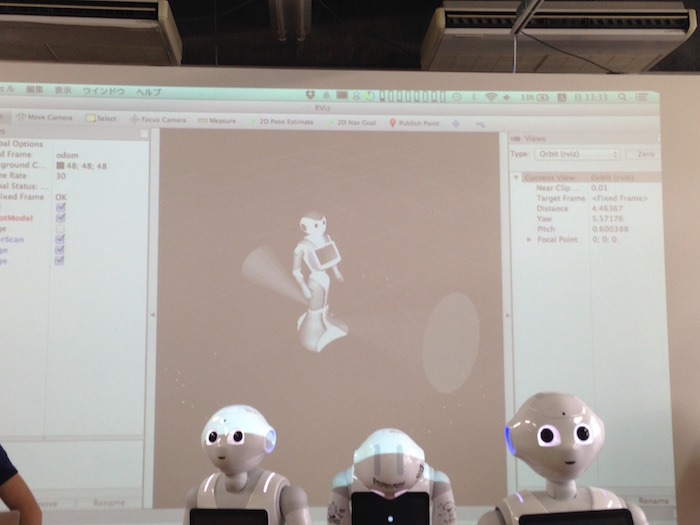
ROSからPepperに接続してみると、つながりました!これがROSからPepperを操作する画面なんですね。
ここまでの説明を受け、参加者みんなでROSからPepperを動かすことにトライ!今回は無事みんなROSからPepperを動かすことができました。
今回のスライドはこちらにアップされてます。
yonekenさんお疲れ様でした!
続いて、アトリエ秋葉原のスタッフの方から、Pepper App Challenge 2015 Winter の告知です。

今回はテーマと審査基準があります。そして、最優秀賞の賞金は100万円かPepperを3年間無償提供受けられます!
Pepperハッカソンの時間です。参加者みんながROSとPepperを使った思い思いのハックに没頭します。
もくもく、もくもく、もくもく。。。


あっという間に時間が終了しました。成果デモ披露の時間です。
ROS経由でPepperに発話させるデモがあったり。

USB接続したセンサー経由で、人間の動き通りにPepperを動かすデモです。人間が動くとPepperが全く同じポースをしてる!

手元のAndroidタブレットをリモコンにして、Pepperを動かしてみるデモです。Pepperのカメラから見える映像をタブレットで確認することもできます。
rosjavaでテレプレゼンス
成果発表のときは動かず…
tangoからpubしたposeを寺田さんがヘッドの動作に対応してくれました!感謝! #rosjp pic.twitter.com/TlDr0opc1S— S.S. (@shinsyu7) September 6, 2015
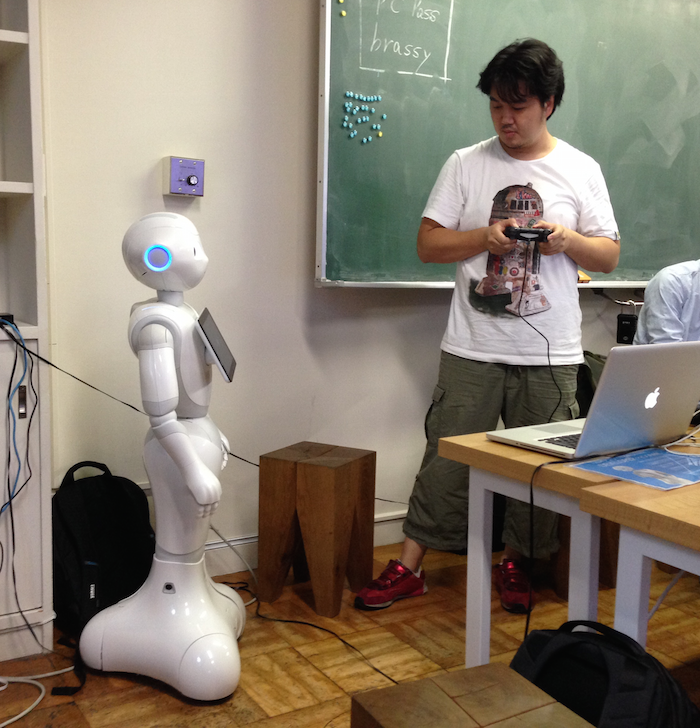
プレステのコントローラーでPepperを動かすというデモです。
ROS-Pepperで廊下の地図をつくるというデモです。認識できた壁を地図にしていくそうです。
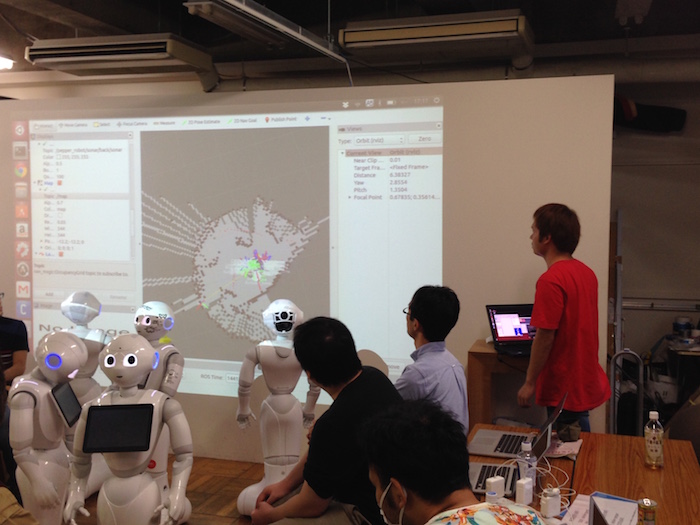
ROS-Pepperでgmapping-slamを動かして廊下の地図を作ってみました。https://t.co/gMX1JKkPVE gmapping_demo.launchだけ動きます #rosjp #pepper_3331 pic.twitter.com/mpLvJiVwl9
— SRC進捗bot (@yoshimalucky) September 6, 2015
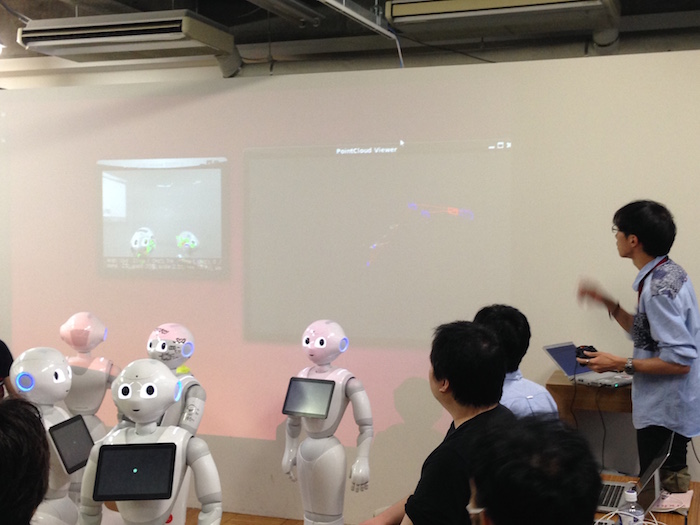
USBで接続したコントローラーでPepperを動かして、マップを作るというデモです。
成果デモの発表は以上です。
続いて、yoshimaluckyさんからの「jsk-ros-pkgの紹介とDRC、HSRハッカソン参加記録」の発表。
斉藤さんからの「ROSロボットで使える安価小型のレーザーレンジファインダ製作」の発表。

ryu_softwareさんからの「RoboCup ヒューマノイドリーグ世界大会優勝チームCIT Brains」の発表。
(ちなみに、全試合の動画がアップされている、CIT Brains公式Youtube はこちらから。ご興味ある方は是非チャンネル登録をお願いします!)
今日の第6回ROSハッカソンは以上です。皆様お疲れ様でした!





この記事を読んだ人におすすめ
ABOUT THE AUTHOR /
北構 武憲PR




このカテゴリの新着記事





注目のロボット









注目のロボット企業







連載・コラム

