


2016年8月4日、技術研究組合 国際廃炉研究開発機構(IRID、アイリッド)主催の「IRIDシンポジウム2016in東京」が東京大学 武田先端知ビルで開催された。
IRID(http://irid.or.jp)とは「International Research Institute for Nuclear Decommissioning」の略称。2013年8月に設立された東京電力福島第一原子力発電所の廃炉のための研究開発を行う技術研究組合だ。国立研究開発法人の日本原子力研究開発機構と産業技術総合研究所、日立や東芝、三菱重工業などのプラント・メーカー、各電力会社など18法人が組合員となっている。
具体的には、使用済燃料プール燃料取り出し、燃料デブリ取り出し準備、そして放射性廃棄物の処理・処分に関する研究開発を行っている。会場ではポスター展示やロボットのデモも行われた。
今回のシンポジウムのテーマは「廃炉の未来を担う」。IRIDの研究開発成果発表だけでなく、これからの廃止措置を担っていく若手研究者、技術者の育成に資することを目的として開催された。廃炉に必要な技術はもちろんロボットだけではなく、あくまでロボットはシステムの一部に過ぎないが、この記事ではロボットに焦点をあてて講演を中心にレポートしていく。
なお、講演で用いられたスライドは、シンポジウムの公式サイト(http://www.irid-symposium.jp)で全て公開されている。
「教科書のない世界」、福島第一原発の廃炉を取り巻く状況

東京電力ホールディングス株式会社 常務執行役で、福島第一廃炉推進カンパニー・プレジデント 兼 廃炉・汚染水対策最高責任者でもある増田尚宏氏は、「福島第一原子力発電所の廃炉を取り巻く状況と課題」と題し、1~4号機の現状と取り組みについて語った。
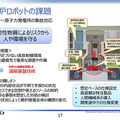
現在、大気中への放射性物質放出量は事故当時の約5,500分の1 になり、福島第一原発は安定しているという。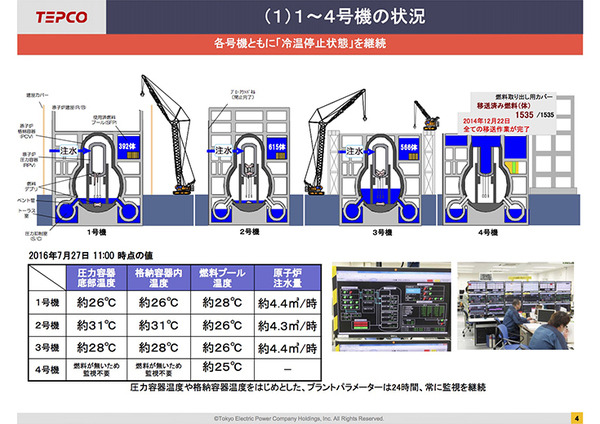
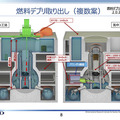
4号機では使用済燃料取出しが計画通り完了した。2号機は上部を切って燃料取り出し装置を設置しようとしている。3号機は使用済み燃料プールからの燃料取り出しに向けて、オペレーティング・フロア上の放射線遮蔽体を設置中だ。1号機は、まだ瓦礫の撤去のための準備中である。
増田氏はそのほか、現在6,000人が働いている労働環境の改善や、雇用形態の見直しによる雇用確保自体の安定、汚染水対策、使用済み燃料プールからの燃料取出し、燃料デブリ取り出し、情報発信と地域との対話について紹介した。「教科書のない世界」なので様々な検討を対話を繰り返しながら探っているという。
また、ロボットはすでに各種が活躍しているが、発電所関連で開発された技術だけでなく、まったく違う分野での新たな技術やアイデアも積極的に投入していきたいと考えていると語った。増田氏は最後に「福島第一原発についてはいろいろなことが言われているが、データに基づいて自分で判断してほしい」と呼び掛けた。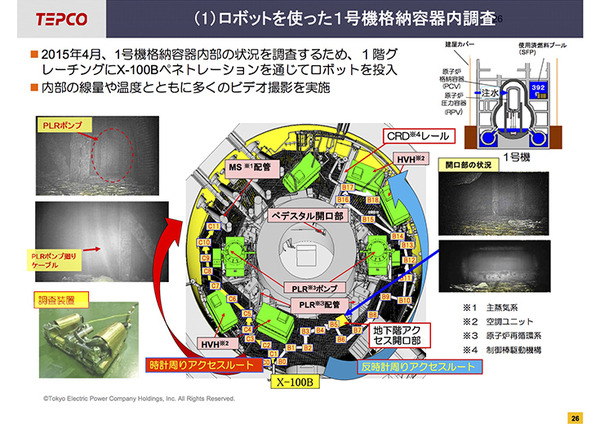
もっとも重要なことは現場の情報を知ること

「IRIDが取り組む研究開発の概要」について講演したIRID開発計画部長 桑原浩久氏は、福島第一のデブリの状況についてから話を始めた。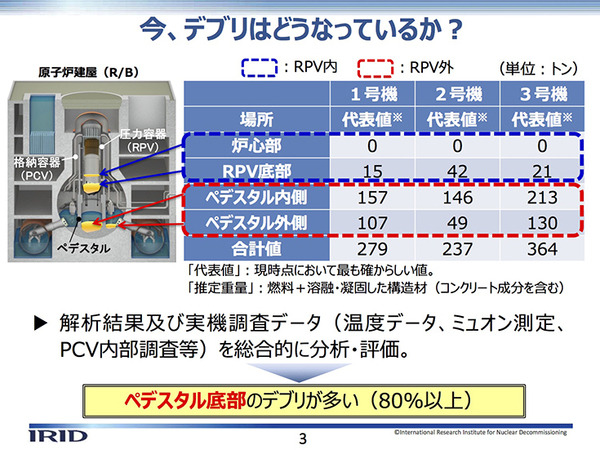
事故を起こし、圧力容器・格納容器ともに機能が失われた福島第一原発は放射性物質の閉じ込め機能が不十分であり、デブリの総量も多い。デブリの大部分は宇宙線のミューオンを利用した観測などから、ペデスタル(原子炉圧力容器の下部の円筒状部分)底部に落下し、底部コンクリートを侵食していると考えられている。まだ除染も完了していない。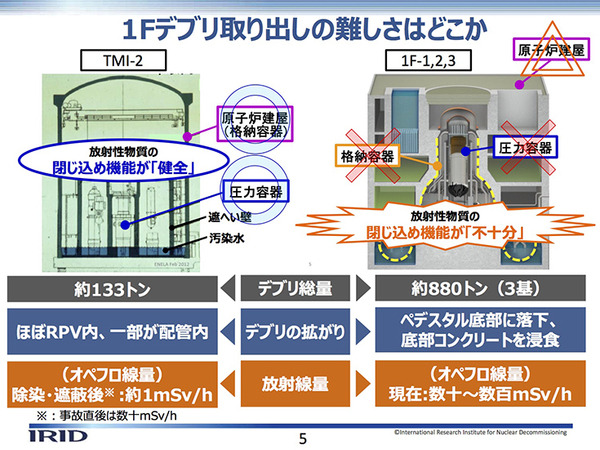
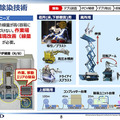
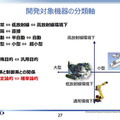
IRIDでは14の研究テーマが走っている。各研究開発は、建屋の線量を下げるための除染技術、デブリの状況を知るための内部調査やミューオンを使った調査・観測技術、破損した格納容器を補修して止水するための技術、デブリを飛散防止しながら取り出す技術、デブリを運び出し保管する技術に分類できる。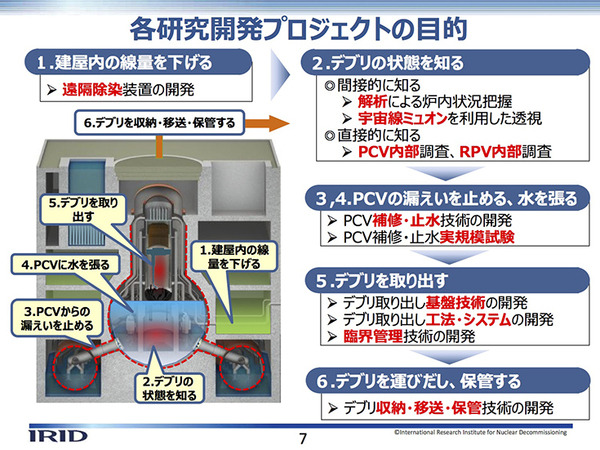
桑原氏はそれぞれの技術についてトピックスを紹介した。ロボットは遠隔除染や内部調査、取り出しなど各ステップで必要とされている。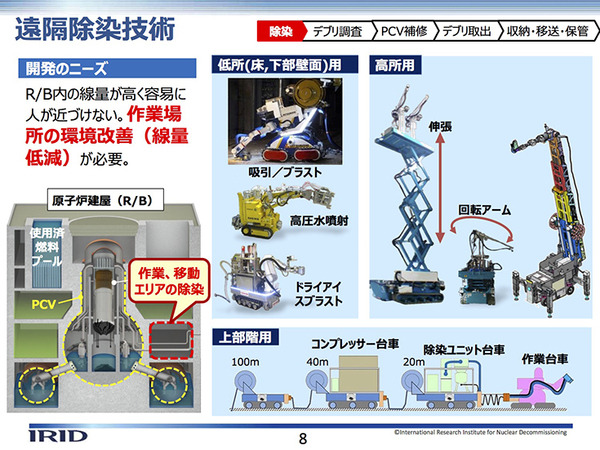

なお、内部調査ロボットについては、会場で試作機を使ったデモも行われた。なお、グレーチングの隙間に入って抜けなくなってしまったりもしたが、新たに投入するロボットにはカメラを追加し、さらに慎重に運用することでトラブルを防ぐつもりとのことだった。
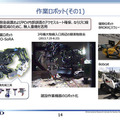
東芝 クローラ型遠隔操作調査ロボット
日立 形状変化型 遠隔操作調査ロボットの試作機
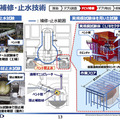
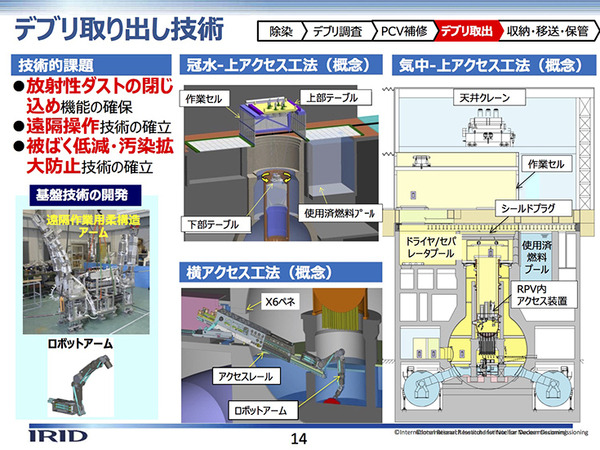
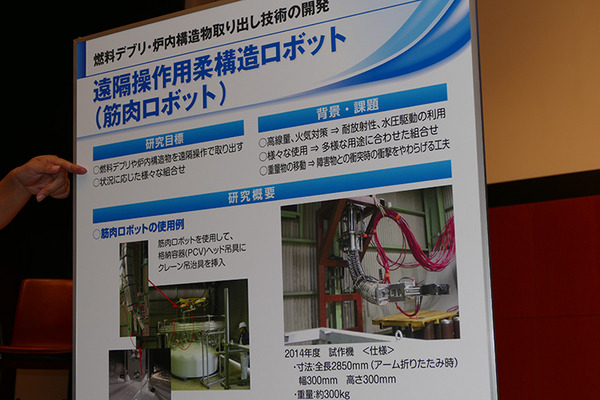
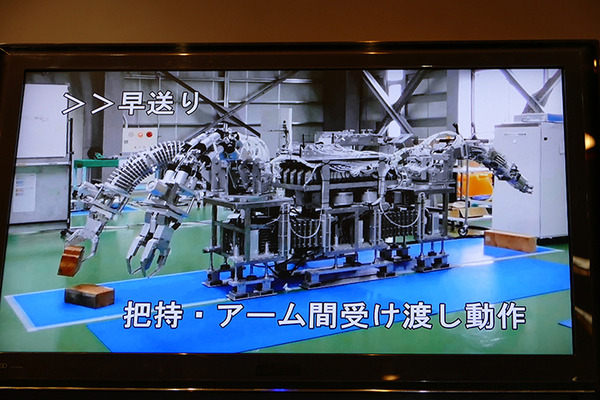
格納容器の補修技術については、楢葉の遠隔技術開発センター内に設置された実規模試験体で実際にあわせこみながら手順を確認していく予定だ。デブリ取り出しには3つの工法が検討されており、柔構造のアームなども開発中だ。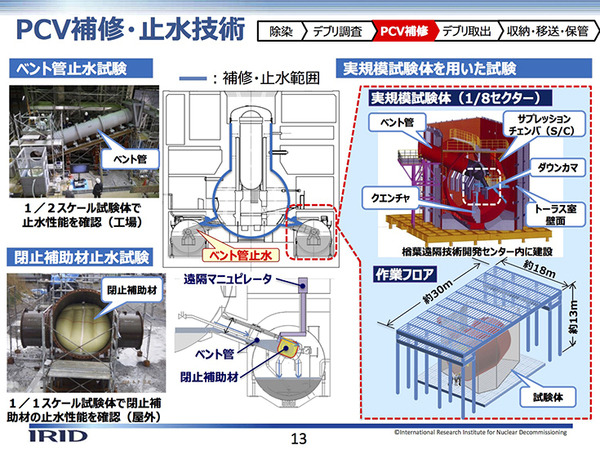
IRIDの技術開発は現場で使われるためのものであり、そのためにもともかく、現場の情報を知ることが何よりも重要だという。課題は多いので学生たちの力も貸してもらいたいと述べた。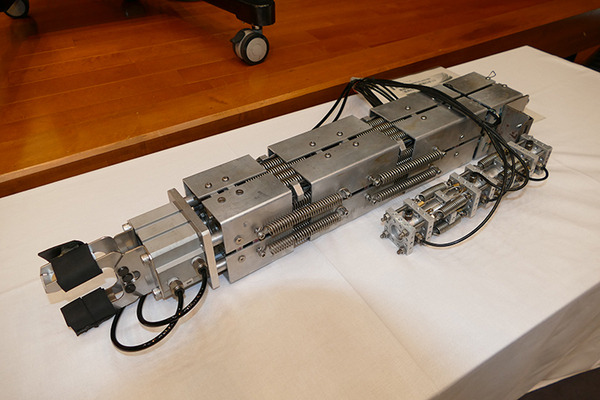
廃炉の未来・解決に向けて

IRID副理事長で、芝浦工業大学教育イノベーション推進センター教授の新井民夫氏は「ロボットが担う廃炉技術 ~研究に励むみなさんに期待すること~」と題して、廃炉作業におけるロボット技術の課題や大学との連携について講演した。廃炉は60年くらいかかる可能性がある。そうなると人材育成や産業技術化を考えないといけない。技術だけではなく社会の問題である。
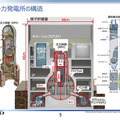
福島第一は46m×46mの建屋のなかに容器がおさめられている。上からアクセスしてデブリを取り出すためには40m程度アームをおろしてモノを取り出す技術や、パイプのなかをとおって内部の様子を探る技術が必要になる。燃料デブリを割ったり、削ったり、回収したりする技術も必要だ。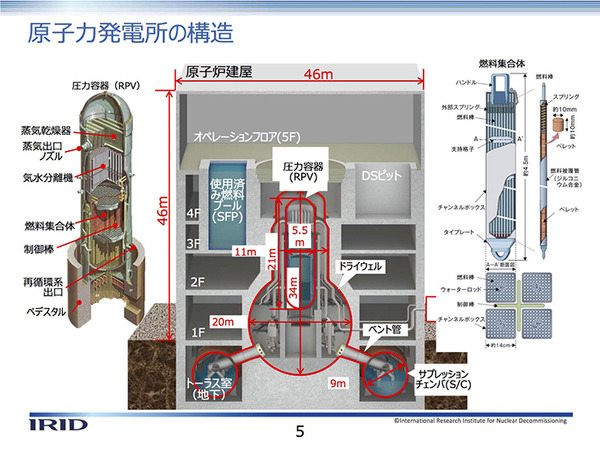
取り出し方法にも冠水工法と気中工法がある。通常は冠水工法で行うほうが安全だが、福島第一の場合は、容器が破損しており、重量に耐えられるかといった問題もある。気中工法では放射線が高くなるため遮蔽物の構築が重要だ。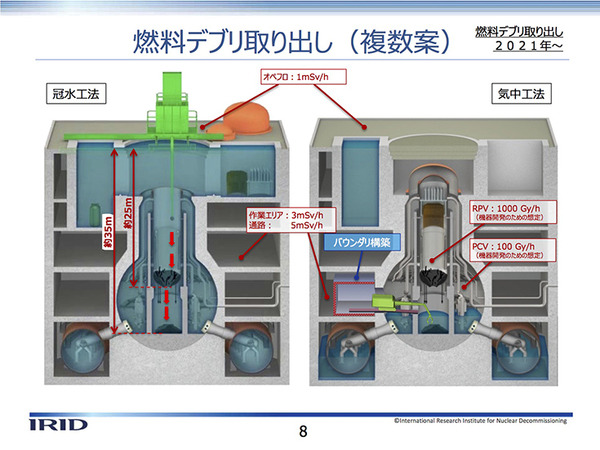
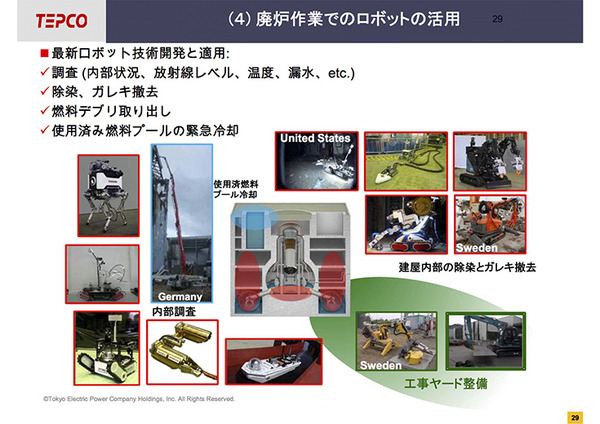
廃炉のためには様々なロボットが開発されている。よく見かけるのがクローラの上にカメラや測定器をのせたロボットだ。このようなロボット開発には、ロボコンの一つ「ロボカップ」で蓄積された知見も使われている。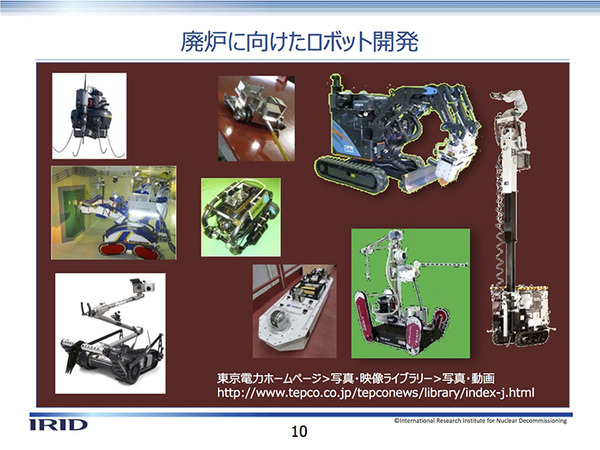
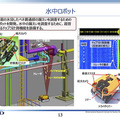
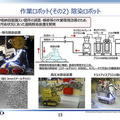
磁気で鋼板に吸着して動くロボットや、水中を動くROVもある。作業ができる双腕ロボットなどもある。これらは炉内に入れたあとは除染も難しくなるため、作り方にも工夫が必要だ。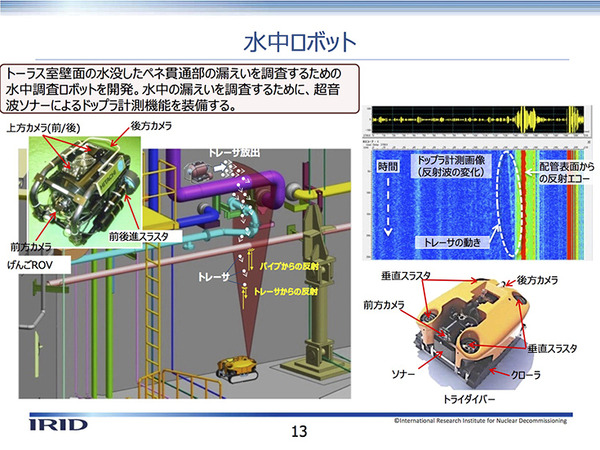
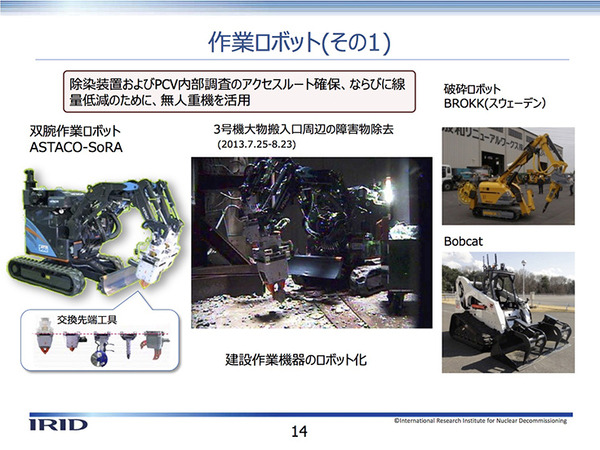
除染は洗浄のほか、表面に研磨剤を吹き付けて、表面を削って回収するブラストなどが用いられており、それらをのせて動くロボットもある。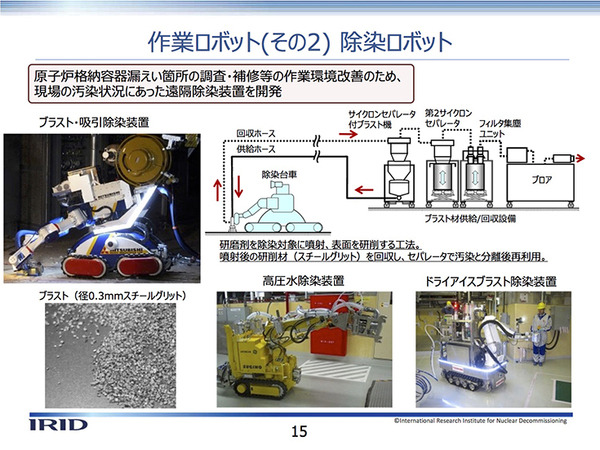
廃炉用のロボットには、小さな検査用ロボットから大きな重機まで様々なロボットがある。目的は放射性物質のリスクから人や環境を守ることだが、ロボット自体の遮蔽や除染も重要だ。状況は不明瞭で、計画も立てにくい。だが計画を立てていかなければならない。
原発内は、自律移動ロボットを運用できるような単純な環境ではない。また遠隔制御にも課題はある。無線も通らず、ノイズも多いからだ。有線にすると、ケーブルを引っ張るためには重さや、絡むといった問題もある。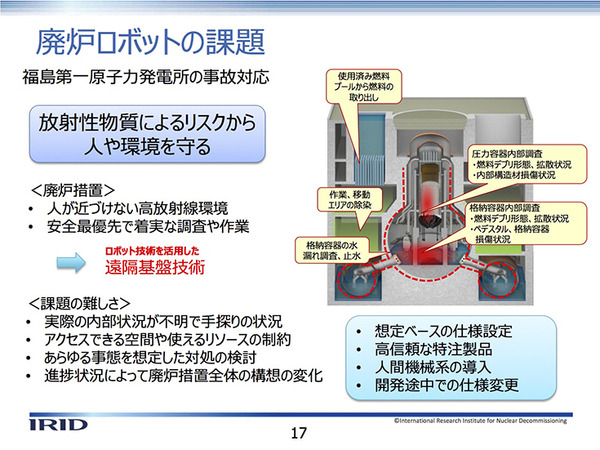
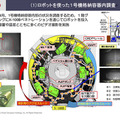
前述のように、格納容器の調査用には2種類のロボットが開発されている。1号機に入れるロボットは狭いところを通過するためのまっすぐな形からコの字に変形する。2号機はカメラや照明を上に折り曲げた「サソリ型」だ。1号機に入れたロボットはグレーチング上で引っかかってしまった。送り出すために設置するのは人間で、被曝量を減らすためには迅速に設置できるようにしなければならない。
現在は遠隔でセンシングしながら手動で動かしているが、複雑な環境下で運用するためには半自動にすることがのぞましい。また、現状では特殊目的のロボットを一つ一つつくっているが、汎用的なロボットを状況に応じて使っていくことが必要だし、決定論的な制御技術だけでなくて、SLAMのような確率的アプローチも必要だろうと述べた。各種技術だけでなく、作業員の訓練や教育、システム化やデータベースも必要だ。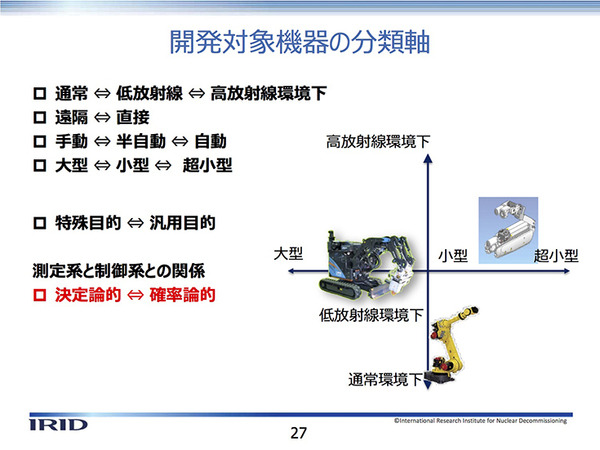
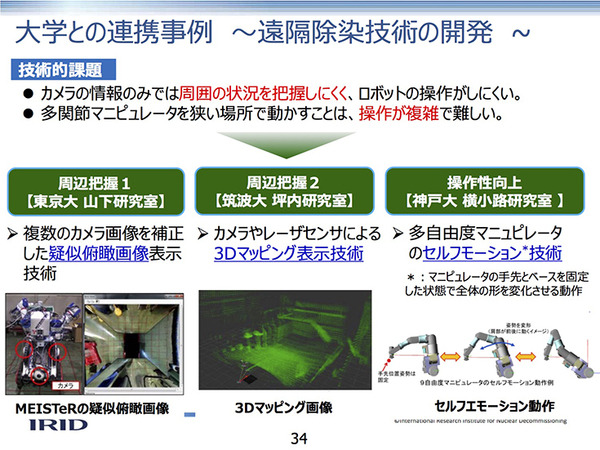
IRIDは研究開発だけでなく、国内外機関との協力、人材育成を3本柱としている。新井氏は大学との連携例として、遠隔除染技術の開発における擬似俯瞰画像の技術、3Dマッピング、多自由度マニピュレータのモーション生成技術の開発、また、補修・止水技術をあげた。このほか、委託研究やワークショップなどを連携して行なっているという。
最後に、新井氏はシンポジウム参加者の21%がアカデミアの人間であることについてふれ、多分野複合技術、未踏分野、長期計画の3つが重要だと再度強調。研究室から外に出て、社会と関連しながら課題を解決する視点を持ってほしい、失敗経験の蓄積と有効利用をすすめてほしいと述べ、「廃炉の未来・解決に向けて力を合わせよう」と呼び掛けて講演を締めくくった。