
NVIDIAは、AIの安全性とセキュリティ向上を目的とした業界横断の新アライアンス「Open Secure AI Alliance」の設立を発表した。Microsoft、IBM、Cisco、Hugging Face、Palo Alto Networksなど主要企業が創設パートナーとして参加し、オープンなモデル・ハーネス・ツールの開発と共有を進める。


株式会社安川電機は2026年7月13日、AIロボット「MOTOMAN NEXT」とフィジカルAIを組み合わせた柔軟物体ハンドリングシステムを紹介する動画を公式YouTubeで公開した。
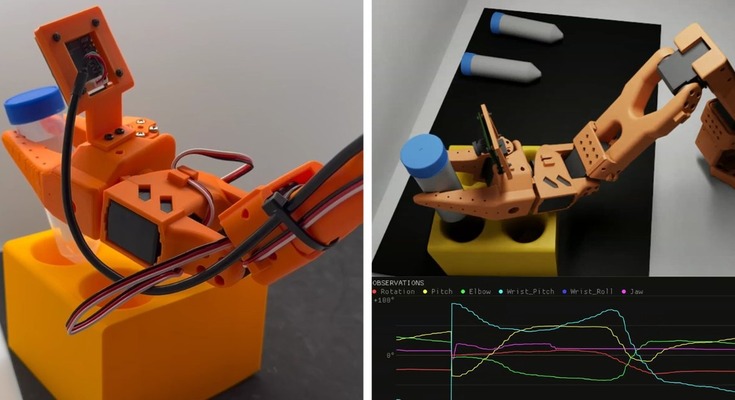
NVIDIAとHugging Faceは、ヒューマノイドロボット向けの視覚言語行動(VLA)モデル「NVIDIA Isaac GR00T 1.7」と遠隔操作フレームワーク「NVIDIA Isaac Teleop」を、Hugging Faceのオープンソースロボット開発ライブラリ「LeRobot」に統合すると発表した。

フィジカルAIソリューションの先駆者であるSiMa.aiは、フィジカルAI向けエージェント型開発環境「Palette Neat」の提供を開始した。複雑なアプリケーションの開発期間を従来の数カ月から数日、場合によっては数時間にまで短縮できるとしている。

AIロボティクス分野の研究開発チーム「Genesis AI」が、ロボット向け物理シミュレーションプラットフォームの新バージョン「Genesis World 1.0」と、同社初のエージェンティックロボット「Eno」を相次いで発表した。

アスラテックは、フィジカルAIの導入を支援する新サービス「フィジカルAI実践ゼミ」の提供を開始した。

NVIDIAは2026年4月14日(月)「World Quantum Day(世界量子デー) 」を記念して開催したQuantum Dayバーチャルイベントにおいて、研究者や企業が実用的なアプリケーションを実行可能な量子プロセッサ構築を支援するオープンソース量子AIモデルファミリー「NVIDIA Ising」を発表しました。

Unitreeは公式YouTubeで、高品質な“実環境ヒューマノイドロボット用データセット”である「UnifoLM-WBT-Dataset」をオープンソースとして公開したと発表しました。本記事では、その動画に寄せられている反響などもピックアップして紹介します。

ソフトバンク株式会社は2026年2月18日(水)、AI-RANのコンセプトに準拠した製品「AITRAS(アイトラス)」のオーケストレーターにおいて、中核機能の一つであるDynamic Scoring Frameworkをオープンソースソフトウェアとして公開しました。

株式会社Enacticは、完全オープンソースのヒューマノイドロボットアーム開発プラットフォーム「OpenArm」を2025年7月23日にリリースした。「OpenArm」プロジェクトでは、人間と共存できる環境での安全性と実用性の両立を目指して開発を進めており、ハードウェア設計から…


ティアフォーと東京大学大学院工学系研究科松尾・岩澤研究室における研究成果の開発・実装を担う松尾研究所は、自動運転レベル4の運行設計領域(Operational Design Domain:ODD)を飛躍的に拡大させるための生成AI開発を開始した。
本プロジェクトでは、大量の走行デ…

rinnaは、日本語と英語のバイリンガル大規模言語モデルを開発した。
対話形式のテキストを生成する対話言語モデル、テキストと画像のマルチモーダル入力を実現する画像対話モデル、長いテキストの入力を可能とする長期コンテキスト言語モデルも開発。いずれのモデルも…