


米国ノースイースタン州立大学(Northeastern State University)は1月22日、同大学助教授のAlireza Ramezani氏の研究開発したロボットLEONARDO(LEg ON Aerial Robotic DrOne)を発表した。
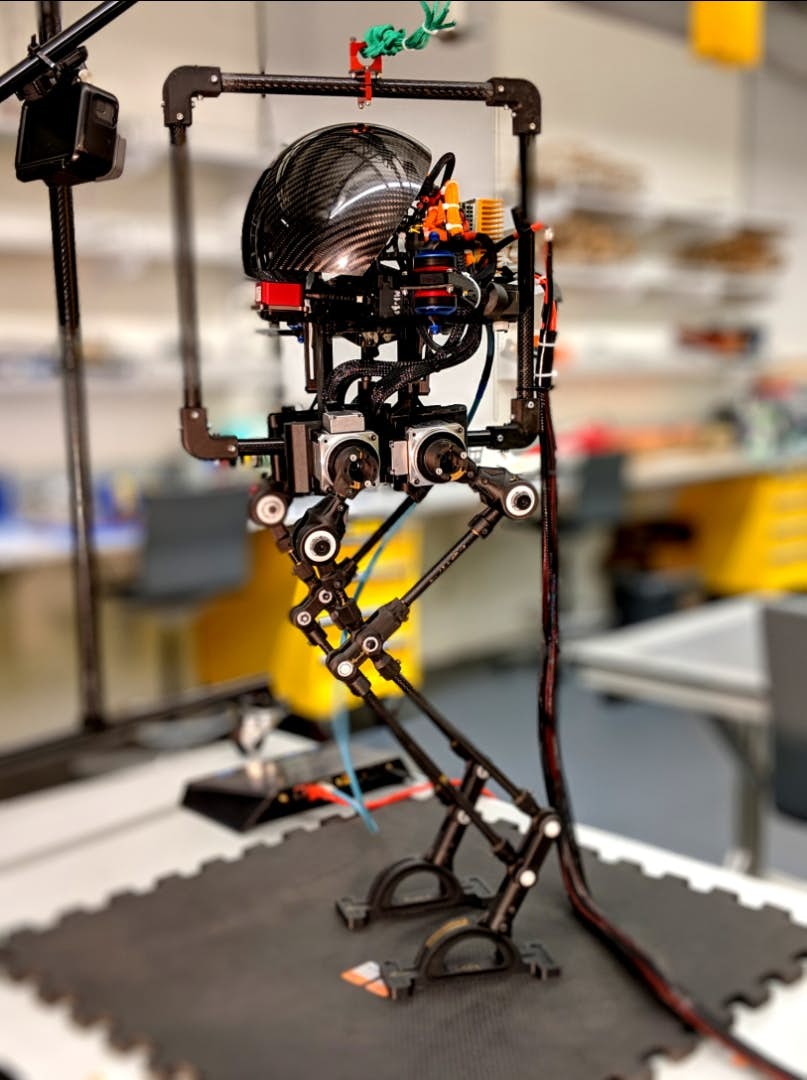
LEONARDOの一番の特徴は飛ぶことができ、歩くことができること。高さは約0.8mで、細くて長い両足を持っており、姿勢は鶏に近い。丈夫さと軽量性を両立する為、Leoは主にカーボンファイバーで作られている。重量はわずか2.7kgしかない。また、体の両側にはそれぞれ一つのスラスタあり、ロボットに飛ぶ力を与えている。開発したAlireza Ramezani氏によれば、スラスタを導入した目的は、市販ドローンのように空に飛ぶことではなく、LEONARDOがジャンプするときの滞空時間を延長させ、障害物を避けて向こう側で安全に着陸するため。
LEONARDOの研究はまだ初期段階だが、将来的には宇宙探索などの分野での活用を図っていくと展望が述べられている。
テニスをしているサムネイル画像が使われているが、これは将来的なイメージということだろう
実は歩行と飛行を両立するロボットは過去にも開発されている。
2015年EPFLが開発したDALER(Deployable Air-Land Exploration Robot)ドローンや、米国UCLAがIEEE2016で発表したヒューマンロイド飛行船ロボットBALLU、2018年東京大学山中研究室の前川氏が発表したロボット「Aerial-Biped」などがある。
EPFL:DALER
UCLA:BALLU
The University of TOKYO:Aerial-Biped
歩行と飛行の両立は難しさもあるものの、実現した際には優秀なソリューションになりそうだ。
関連サイト
米国ノースイースタン州立大学公式ニュース
米国ノースイースタン州立大学公式ニュース
