





近年、少子高齢化が進むにつれて日本の労働人口はますます減少している。そのあおりを直接受けるのが製造業であり、以前にも増して労働力を確保するのが難しくなってきている。それに加えて、技術力への自負とIT導入コストへの懸念から、日本のIT活用は他国に比べて遅れをとっており、海外市場から取り残される可能性も考えられる。以前にも増してボーダレス化した世界の製造業と戦っていくためには、「人材不足」「IT活用」の課題を乗り越えていかなければならない。
そこで、数理・物理アルゴリズム(AI)の開発を行う東大発AIベンチャー、TRUST SMITH株式会社は、このような製造業での問題を解決すべく、人工知能を使った障害物回避型アームのアルゴリズムを開発。
これまで手作業で行っていたとされる工場などでのピックアップ作業を自動で行え「人件費削減と労働力不足の解消」「データの蓄積と消費エネルギーの最適化」「作業のミス・災害の防止の実現」を可能にした同開発が、特許を取得したことを2020年11月4日に発表した。
同社は、独自の技術を発明し社会実装することで、技術的優位性の高いビジネスを展開していくと共に、最短経路で良いよい社会の実現を目指すと述べている。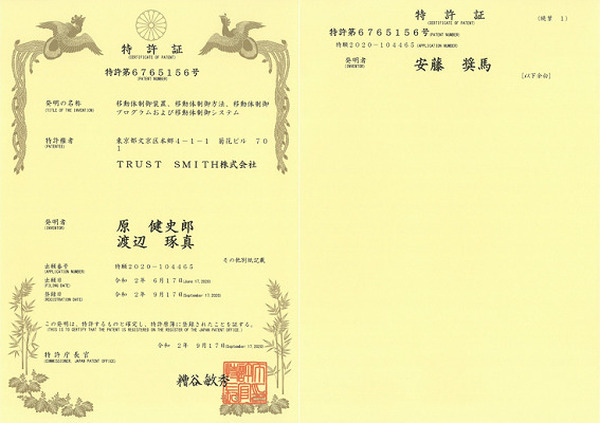

▼ 特許情報
| 発明の名称 | 移動体制御装置、移動体制御方法、移動体制御プログラムおよび移動体制御システム |
|---|---|
| 特許番号 | 特許第6765156号(P6765156) |
| 特許権者 | TRUST SMITH 株式会社 |
| 発明者 | 原 健史郎 氏、渡辺 琢真 氏、安藤 奨馬 氏 |
障害物回避のアルゴリズムについて
開発に成功したのは、「リーマン計量」と呼ばれる微分幾何学の理論に基づくものだ。空間内に存在する障害物を回避し、目的物へアプローチすることができるアルゴリズムで、アームから見た空間内の物体との距離、相対速度または相対加速度に応じて適切に場を計量することができるため、障害物が動いていても安全に回避しながら、目的物へ到達することが可能になる。
障害物回避型アームに期待される作業の事例
障害物回避型アームの活躍の範囲は多岐にわたり、従来人々が手作業で行ってきたあらゆる作業をサポートすることを期待している。具体的には、以下のような業界・業種において障害物回避型アームが作業を自動で担うことが可能になる。
・製造業(食品):食品の調理工程における作業全般
・農業:野菜や果物の最適な収穫時期の判定と収穫作業
・インフラ(原油):原油配管の超音波非破壊検査作業
・サービス業(卸・小売):食品スーパーにおける商品陳列作業
・サービス業(空港):空港内手荷物のバックヤードにおける搭載・取降工程における作業
同社の今後の展望
同社は、社内の組織体制として「ラボ制」を採用し、東京大学や京都大学をはじめとする学術機関に在籍あるいは卒業した研究員を中心に、当社独自のアルゴリズムの研究開発に取り組んでいる。OSSを活用したソリューションの提供ではなく、他社に模倣されない同社独自の技術を発明し社会実装することで、技術的優位性の高いビジネスを展開していくと共に、最短経路で良いよい社会の実現を目指すとしている。
https://www.trustsmith.net/products/adam-smith
TRUST SMITH株式会社
