







Omnibotシリーズ最新作、「MECCANOID G15 TYPE61」を入手していたのですが、なかなか作る時間がとれず、、、、先日やっと半日ぐらいまとまった時間がとれたので組み立ててみました。
ちなみに、G15とG15KSという2タイプがありまして、部品点数や組立後のサイズに違いあります。大型のG15KS(身長122cm)はまだ発売されていないので、まず小型のG15(身長61cm)の紹介となります。
今回はまずその組み立ての様子をご紹介します。

開封の儀から行きましょう。対象年齢15歳以上と明記されています。

箱の後ろにはできること、がいろいろ書いてあります。詳しくは公式サイトをご覧ください。
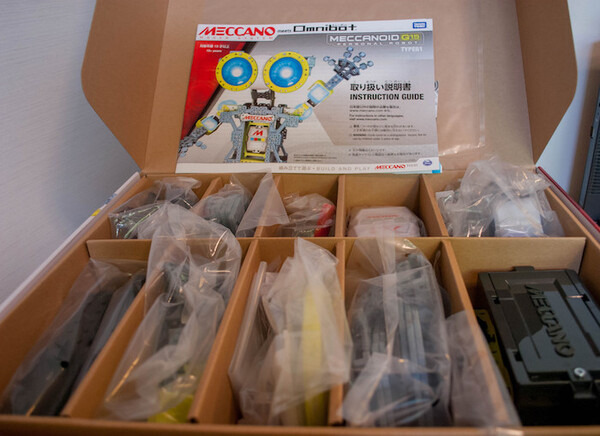
箱を開けると部品が大量に!なんと部品は全部で614個・・・って説明書に書いてありました。

小さいネジ類が山程あって、ちょっとびっくりです。ネジだけで250本ほどあります。これをねじねじするかと思うと、半日で切るのか、不安になります。

工具も付属してますので特に何か用意する必要がありません。説明書通り組み立て開始です。
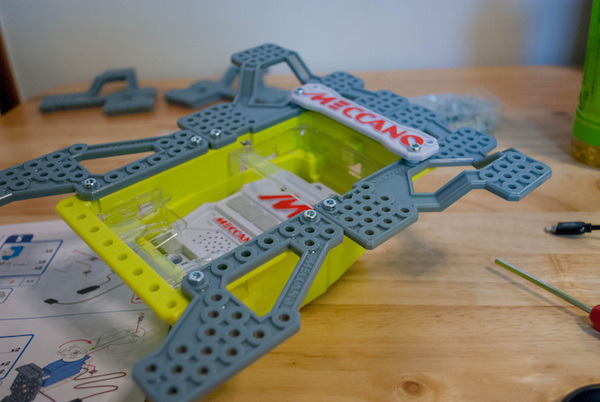
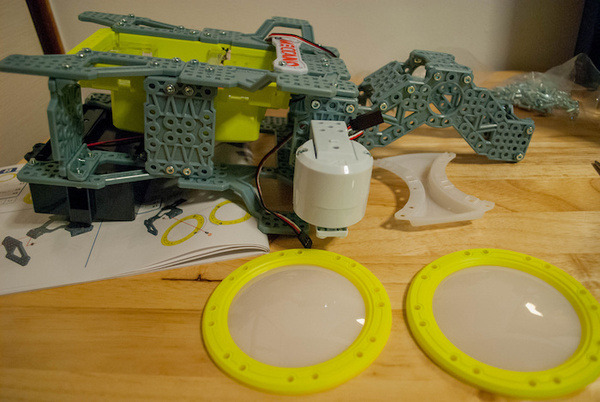
基本的にボルトとナットの組み合わせでブラスチックパーツを固定していく感じです。パネルには穴がたくさん空いてますが、説明書通りにやれば大丈夫。これが胴体です。
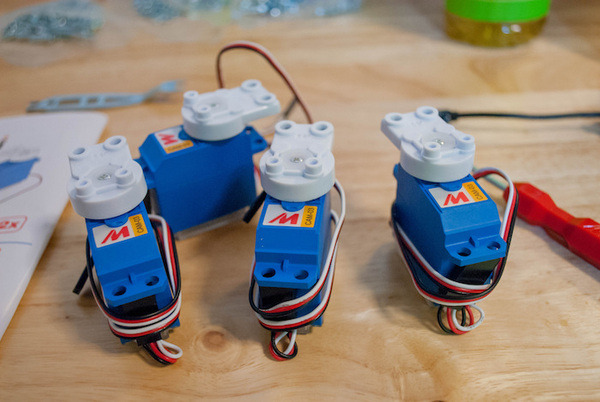
G15にはサーボは4つ。足には別のモーターがあります。6箇所が駆動するようです。

箱のなかは仕切り板があるので、部品を探すのは容易です。
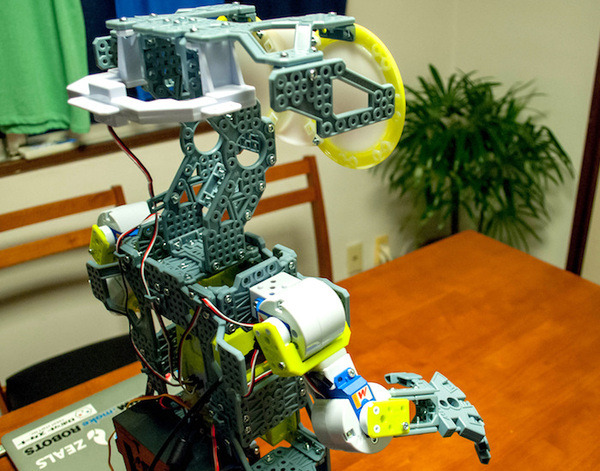
腕にサーボを仕込みつつ、目を作っていきます。だいぶ疲れてきました。
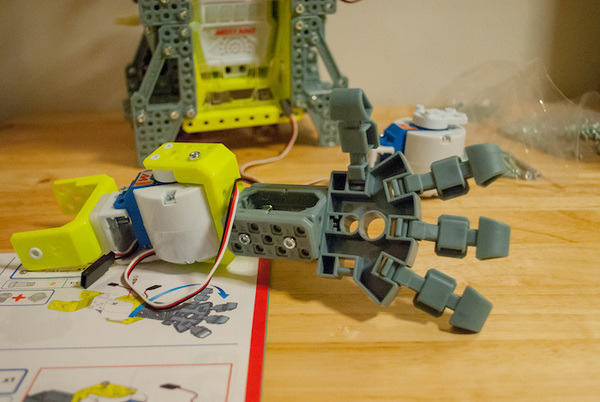
続いて手。指は電動では動きませんが、自由な形に動かせます。
ここまでくるのに指がだいぶ疲れてきました。
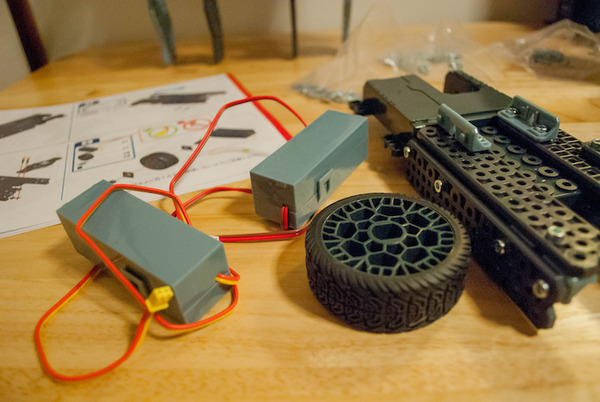
続いて足の制作です。モーターでゴムの車輪を動かすようになっています。
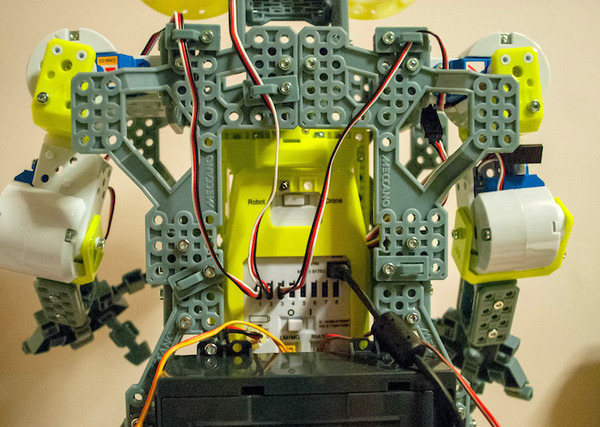
背中についてるコネクタにケーブルを繋いでいきます。説明書どおりにやってるだけなので迷わずいけるはず。
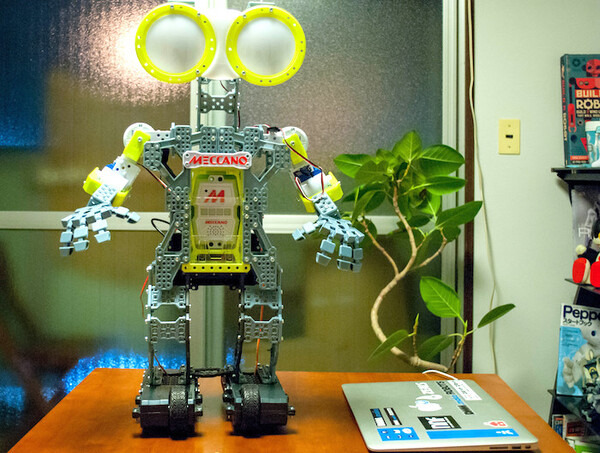
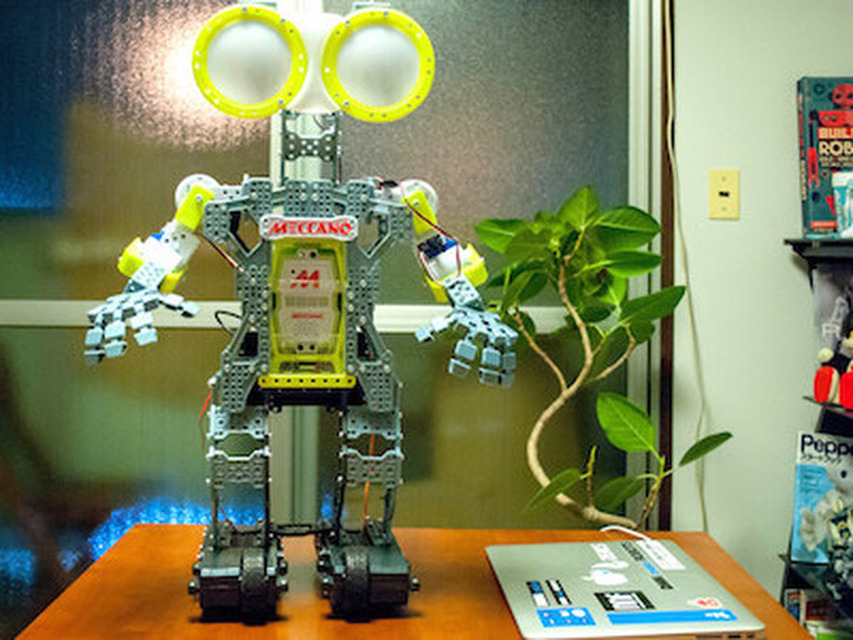
組み立ては完了しました。ここまでで4~5時間はかかりました。ふぅ、疲れたー。
でも予定通り半日で作れたので満足です。
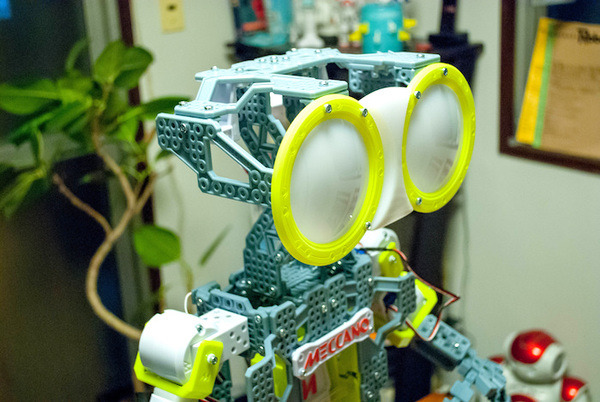
特徴的な顔というか目。メガネをしてる感じ?
なお、組立後に、首の色のパーツを間違ってしまってることが発覚。本来首の色は暗い色のパーツだったのですが、形が同じ色違いパーツがあって、そこに気が付かないまま組み立ててしまっていました。直すのには時間がかかりそうなので一旦このままで行きます。

Pepperと並べてみました。結構大きなサイズですよね。
次回、電源を入れてみてのレポート予定です。ではまた!