




株式会社Mobility Technologies(以下、MoT)は次世代のモビリティ関連事業に向けたR&Dの一環として静岡県が取り組む『しずおか自動運転ShowCASEプロジェクト』における下田市での公道での実証実験(2020年12月7日~12月15日)にて、自動運転車両への信号情報の配信を担当することを発表した。
実証実験では各社で様々な技術的課題の検証が行われる。MoTは東海国立大学機構 名古屋大学が担当する自動運転システム内で、配信された信号情報を活用した円滑な加減速を行う技術を検証する。なお、配信は警察庁が2018年3月から開始した、信号情報を車両に送る無線装置を信号制御機に接続する機会を民間事業者に提供する申請要領に基づいて実施する。
信号情報を受信した車両は「進む」か「停止」かの制御を行う
静岡県下田市は3つの交差点(うち1つは押しボタン式信号機を採用)を通過するルートにて実証実験を行う。各交差点の信号制御機には日本信号の専用無線装置を取り付け、MoTは信号の灯色や残り時間などの信号サイクル情報を携帯電話網を用いてクラウドサーバーで収集し、自動運転車両からのリクエストに応じて、自動運転車両へ配信する。同システムの開発においてはMoTがこれまで培ってきたクラウド技術の経験を活かし、低コストかつ汎用的な仕組みを実現。信号情報を受信した車両は自動運転システムにより「進む」か「停止」かの制御を行う。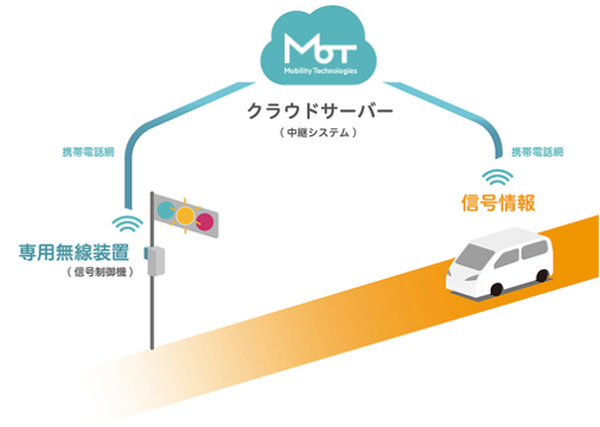
信号情報の配信はこれまでに2018年4月の神奈川県藤沢市、2019年3月の愛知県常滑市、2020年2月の愛知県春日井市等での実証実験を通して、技術面及び安全面の検証を行ってきている。同社は引き続き様々な条件下での公道での実証実験を行い、将来の一般化、拡大に向けて検証を行っていく。
MoTは今回の取り組みやその他のR&D、及びそれらの組合せにより、自動運転時代に必要となるダイナミックマップやスマートシティ等に向けた、次世代のモビリティ関連サービスの実現に向けて取り組んでいく。
自動運転 関連記事





