






以前紹介したPLEN.Dですが、実機を入手、組み立ててみましたのでレポートします。
箱はこんな感じ。美しいパッケージですね。
開けてみるとパーツが区分けして入っていました。
取り出すとこんな感じ。初心者の僕でも組み立てられるんでしょうか・・・ちょっと心配です。
説明書は付属のUSBからファイルを参照する形です。印刷するか、パソコンの画面を見ながら作るという事になります。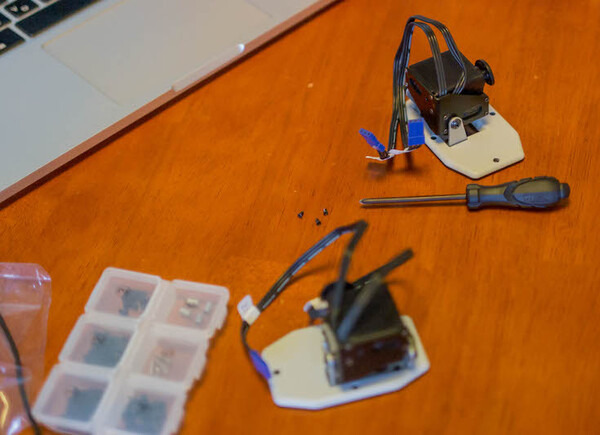
早速組み立て作業開始です。ドライバーは付属しています。またネジも専用の小分けされたケースに入っているのは親切です。
足から組み立てていきます。組み立てる過程を通じて、ロボットの構造を勉強できます。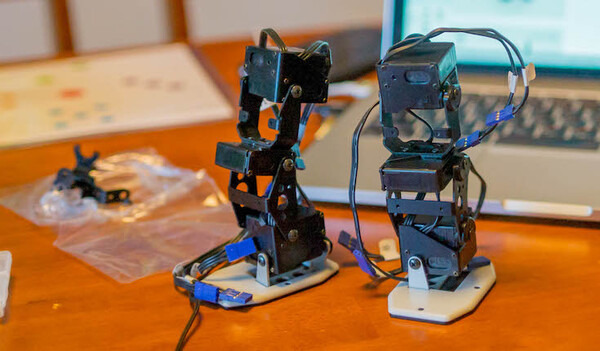
両足が完成。サーボをこんな感じで組み合わせて足ができてるんですね。すごいなぁ。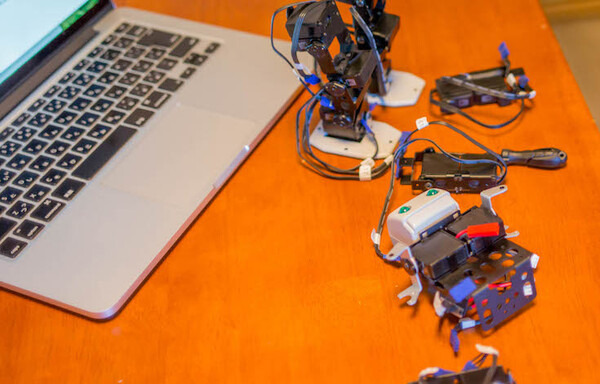
最初は組み立てに戸惑いましたが、徐々に慣れてきました。腕、胴体とさくさく進みます。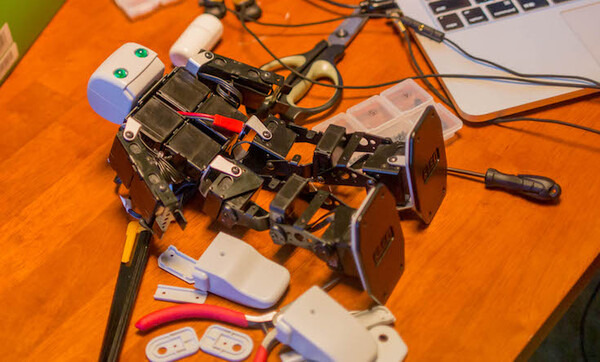
組み立てたパーツを胴体にくっつけていくと、もうロボットって感じになってます。
ケーブルは透明なビニール線でまとめていきます。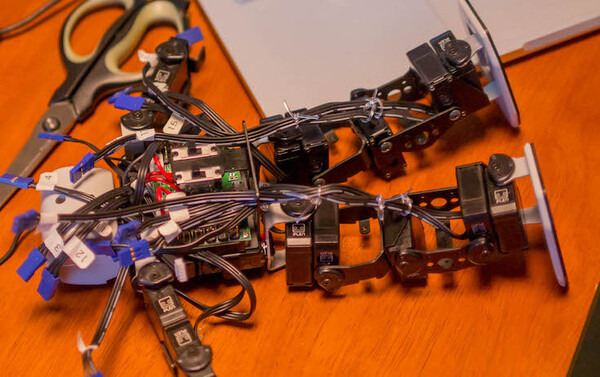
背面に基盤を取り付けて、配線していきます。この基盤を取り付ける時だけピンセットが必要で、苦労しました。実際ひとりではうまくできなかったので手伝ってもらいました。
また基盤にサーボなどから出ている配線を繋いでいくのですが、とにかく配線が多いので間違えないように注意が必要です。配線にはもともと番号が振ってあるので間違いにくいように配慮されています。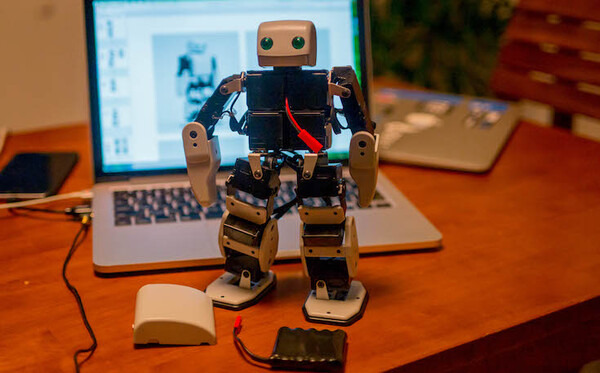
あとは樹脂パーツを取り付けていきます。手前に見えるのがバッテリーです。
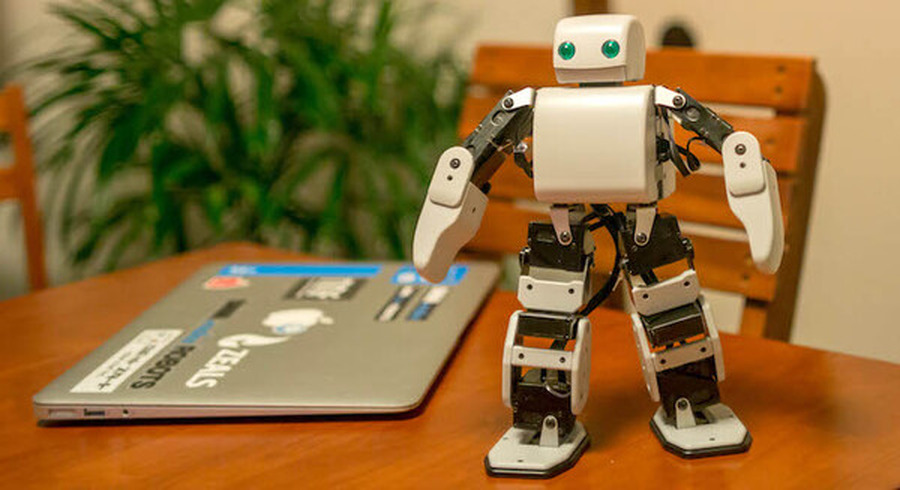
完成!ここまでで4時間位かかりました。仕事も合間にしながら作業していたのでちょっと時間かかりすぎかも。
完成した姿を見ると、作った喜びを感じます。出来上がったものを買うのとはやっぱり印象が違いますね。愛着わきます。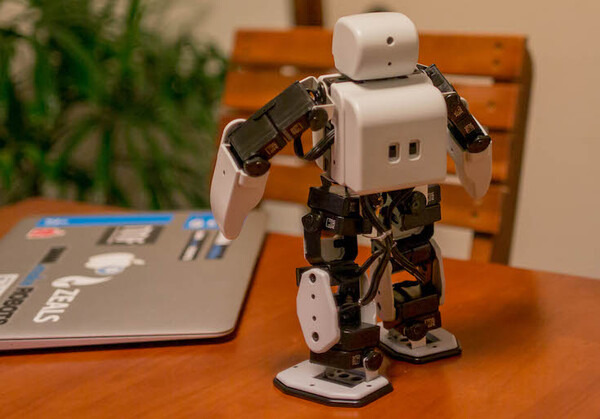
背面にあるスイッチを入れて、動作確認!
そしたら右半身が上手く動かない(T T)
続く・・・。





