





研究開発型ベンチャーの株式会社メルティンMMIは、身体による限界を突破し、人類の創造性を開放するためのサイボーグ技術の開発を目指している。
同社はサイボーグを開発するにあたり、まずは人間を構成する上で最も巧緻な部位である「手」に着目し、人間と同等レベルの手を生み出すことを目標とした。身体の動作を忠実に解析する「生体信号処理技術」と、生体模倣から着想を得た「ロボット機構制御技術」をコア技術とするサイボーグ技術を使った実用可能な「筋電義手」を開発したと言う。そして、その技術を搭載した独自開発のアバターロボット「MELTANT-α(メルタント・アルファ)」を発表した。
■【動画】MELTANT-α CAPABILITIES
MELTANT-αはそのサイボーグ技術のノウハウを活かして開発したアバターロボットのコンセプトモデルにあたり、同モデルをベースとしてハンド単体、ハンド・アーム、全身の3プロダクトを展開する。
「MELTANT-α」の特徴
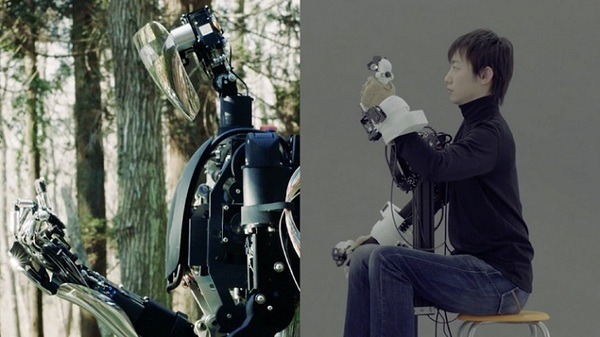
MELTANT-αの手の動作構造は、人の身体、特に筋肉と腱の構造を徹底的にリサーチし、人の手を“生物模倣”し、ワイヤー駆動によって人の手の複雑な動作を再現し、従来のロボットでは考えられない力強さと器用さを兼ね備えた、人の手と同等のサイズ・重量の世界初のロボットハンドを実現。さらに、遠隔操作性・リアルタイム性・耐久性・ハプティクスの4つの優れた性質を備え、世界のあらゆる場所へ進出可能な「分身=アバター」となる。
人の手が持つ繊細さ、器用さ、力強さといった特徴を、ひとつの手で構成する同技術は世界でもまだ前例がなく、世界のどこへでも進出可能な「もうひとつの身体」となる、まったく新しいテクノロジーだとしている。
パワー
手の構造を模倣したワイヤー駆動により、片手でも2kgのボトルを持ち上げたり、4kg以上の物体を両手で支えるといった動作が可能だ。この技術はアクチュエータに依存しないため、油圧など他のアクチュエータと組み合わせることができる。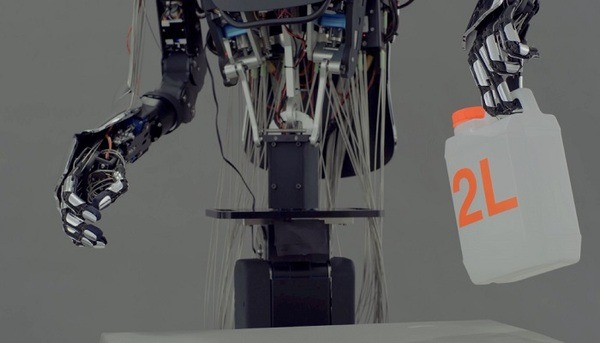
繊細さ
従来の技術ではワイヤー駆動は制御が難しく、人の手のような繊細な動きを再現することは困難だったが、MELTANT-αは独自の制御アルゴリズムによって、卵を割らずにつかんだり、ペットボトルのキャップを開けたりするような、緻密な動作を行うことが可能だ。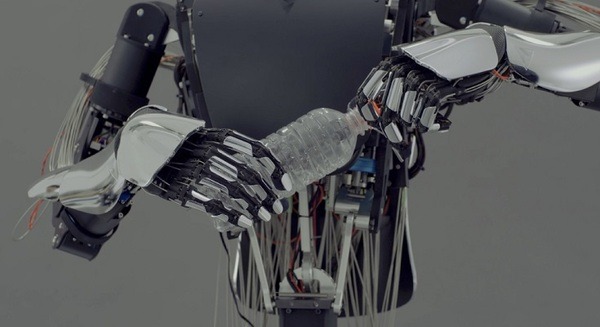
遠隔作業できる「分身=アバター」
リアルタイム性:人の手の動作速度をほぼ遅延なく再現可能
耐久性:高い耐故障性とフェイルセーフ機能により過酷な環境でも作業可能
ハプティクス:力覚をフィードバックする事で力加減を調整可能
今後の展開について
同モデルは、ロボットハンドが抱えていた最も重要な課題「力強さと繊細な動きを両立できない」という点を解決したことで、従来は困難であった複雑な作業も可能となり、危険な環境下(災害、高所、高温、水中、化学・生物・放射能汚染、爆発物除去)など、多様な分野にて応用の可能性が拡がったと言えるだろう。今後の開発が楽しみだ。
MELTIN MMI
