




知能ロボットを中核とした自動化統合プラットフォームを提供する総合オートメーションテクノロジー企業のMujinは、株式会社SUBARUの群馬県 大泉工場にて、独自のソフトウェアプラットフォーム「Mujinコントローラ」と、バラ積みピッキング知能ロボット「PickWorker」を用いて、クランクシャフト鍛造粗材の加工ライン投入作業を自動化したことを発表した。
Mujinが提供するソフトウェアプラットフォームを活用することで、これまで困難だった以下3点を実現した。
1.複雑な形状の粗材ハンドリングをティーチレスで実現
2.タクトに悪影響を与えず、スペースの最小化を実現
3.リアルタイムデジタルツイン環境で知能ロボットセル全体の状態可視化を実現
独自ソフトウェアプラットフォームで構築する自動化のメリット
ソフトウェアプラットフォームを基盤に自動化セルを構築し、これまで困難であった上記3点を実現することで、以下の付加価値を提供する。
1.複雑な形状の粗材ハンドリングをティーチレスで実現
知能ロボットを用いた自動化では、従来の自動化に比べて知能ロボットセルの立ち上げまでにかかる工数を削減する。また、複雑な形状の粗材ハンドリングに必要だった人員の省人化を可能とする。
それを可能とするのは、Mujin独自のソフトウェアプラットフォーム。ソフトウェアプラットフォームで、対象物の形状や周辺環境を高精度で認識する3Dビジョンシステム・ロボットハンド・アーム・各種センサー類を一括制御することで、3Dビジョンシステムによるリアルタイムな認識結果を基に、瞬時に最適なロボット動作を計算・生成する。そのため、事前にロボット動作を一挙手一投足ティーチングする必要がなく、複雑な形状の素材を扱う場合も、知能ロボットが柔軟な対応を可能となる。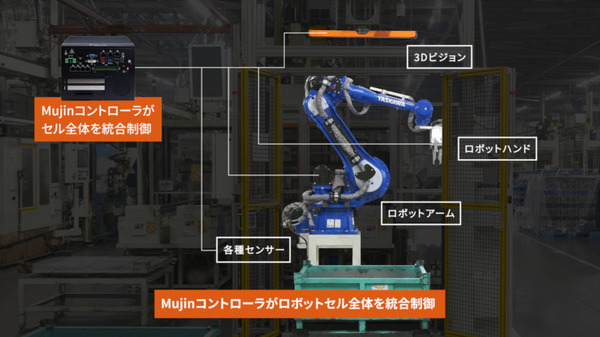
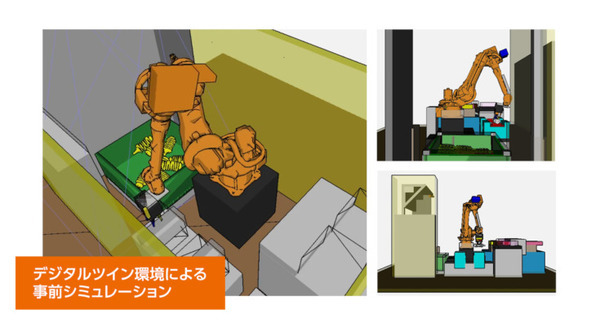
2.スペースの最小化を実現
Mujinのソフトウェアプラットフォームは、既存の工場内に新規に自動化設備を導入する場合でも、大型のロボットを採用しながらも、必要最低限のスペースでの自動化を行うことができる。
高度なデジタルツイン技術により、現実と同じデジタル環境での事前ロボット動作計画シミュレーションができるため、設計段階で最低限必要なスペース算出を行うことができる。
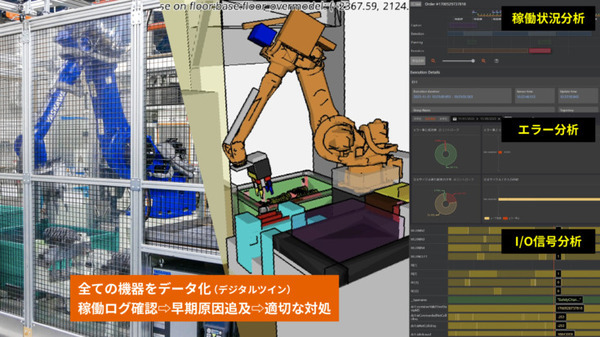
3.リアルタイムデジタルツイン環境で知能ロボットセル全体の状態可視化
Mujinのソフトウェアプラットフォームを基盤に構築する知能ロボットセルは、導入後の安定稼働に貢献する。
万が一のトラブル発生時でも、リアルタイムデジタルツイン技術により、セル内のどこで何が起きているのか詳細がリアルタイムで可視化されているため、リモートサポートによる初期対応・早期原因追及・トラブルに対して適切に対処できる。
また、粗材同士が絡まることでロボットが2個同時に把持し、一時的に停止してしまうことを未然に防ぐためのセンサーによる異常検知機能を搭載。これにより、導入後の安定稼働を下支えする。
SUBARUは、Mujinが提供しているこのソフトウェアプラットフォーム基盤の自動化を評価し、今後、他のラインへの導入も検討しているという。
SUBARUに導入した「PickWorker」は、バラ積みされた様々な部品のピッキングをティーチレスで自動化する知能ロボット。PickWorkerの詳細、導入事例、対象ワーク一例は、下記リンクで確認することができる。
https://www.mujin.co.jp/solution/fa/picking/
