国立大学法人宇都宮大学は、工学部のRenato Miyagusuku(ミヤグスク レナート)准教授が研究代表者を務める「非GPS・不整地環境対応の自律測量ロボティクスによる建設支援インフラの創出」が、科学技術振興機構(JST)の「大学発新産業創出基金スタートアップ・エコシステム共創プログラム」に採択されたと発表した。
本テーマは、同プログラム内の地域プラットフォーム「Inland Japan Innovation Ecosystem(IJIE)」が実施する「GAPファンドプログラム2025 ステップ2 インパクトビジネス枠」での採択となる。今後は、株式会社みらい創造インベストメンツが事業化推進機関として伴走し、技術の事業化とスタートアップ創業を目指す。
建設業界の課題解決を目指す自律測量ロボット
建設工事における測量は、設計や施工の精度、工期を左右する重要な工程である。しかし、国内の建設業界では担い手不足と就業者の高齢化が深刻化しており、継続的な測量の実施が困難になりつつある。
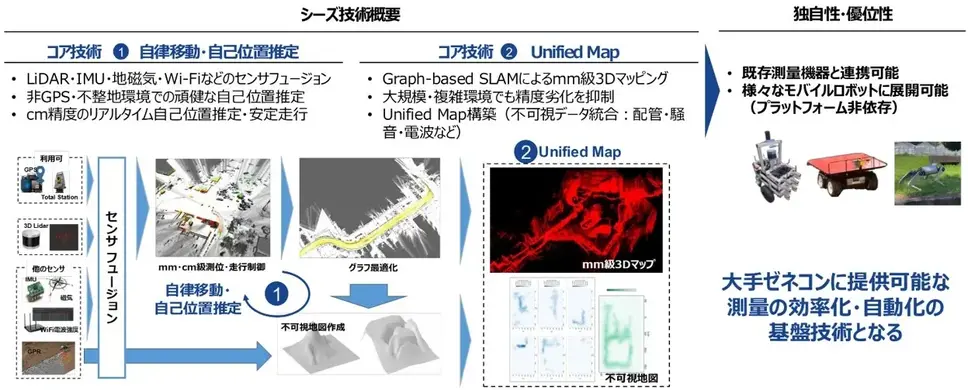
本プロジェクトは、こうした課題を解決するため、GPSが利用できない環境や凹凸の多い不整地でも自律的に測量を行えるロボティクス技術の開発を目的としている。複数のセンサー情報を統合する「センサフュージョン」技術を活用し、ロボットが自らの位置を正確に特定しながら、地形や構造物を三次元的に高精度で計測する仕組みを構築する。
さらに、測量作業だけでなく、取得したデータの整理から報告書の作成まで一連のプロセスを自動化することで、現場の生産性と精度の向上を図り、持続可能な社会インフラの整備に貢献することを目指している。
2027年度のスタートアップ設立に向けた事業化計画
本研究で開発される技術を基盤とし、建設現場向けの「自律測量ロボットシステム」の事業化が計画されている。このシステムは、ロボットが現場を自律走行しながら測量とデータ化を行い、取得した情報を設計図や報告書に自動で反映させることで、作業時間とコストの大幅な削減を可能にする。
また、多様な環境下でも高精度な測量を維持できるため、施工品質の安定化と効率的な現場運営を実現する次世代の測量支援ソリューションとして期待される。将来的には、建設現場での墨出し作業やインフラ点検など、建設サイクル全体のさらなる自動化への応用も視野に入れている。
今後の計画として、建設関連企業と連携して実証実験を進め、ロボットの実用性と信頼性を検証する。並行してビジネスモデルの具体化やパートナー企業との連携を推進し、2027年度のスタートアップ設立を目指すとしている。設立後は、性能の安定化、資金調達、販売体制の構築を進め、早期の事業化を図る方針だ。