






イギリスのスタートアップ企業Humanoid(SKL Robotics Ltd.)は、産業、サービス、家庭向けアプリケーションにおけるヒューマノイドロボット群のエンドツーエンド制御を実現するAIフレームワーク「KinetIQ」を発表した。

単一システムで異なる形態のロボットを制御し、ロボット間の相互作用を調整できる点が特徴だ。
4層構造で異なる時間軸を同時制御
KinetIQのアーキテクチャは、4つの層が同時に動作するクロスタイムスケール構造を採用している。
群レベルの目標割り当てからミリ秒レベルの関節制御まで、各層は下位層をツールセットとして扱い、プロンプトとツール使用を通じて上位層から設定された目標を達成する。このエージェント的パターンは、最先端のAIシステムで実証されており、コンポーネントが独立して改善しながら、システム全体がより大規模な群とより複雑なタスクに自然にスケールできる。
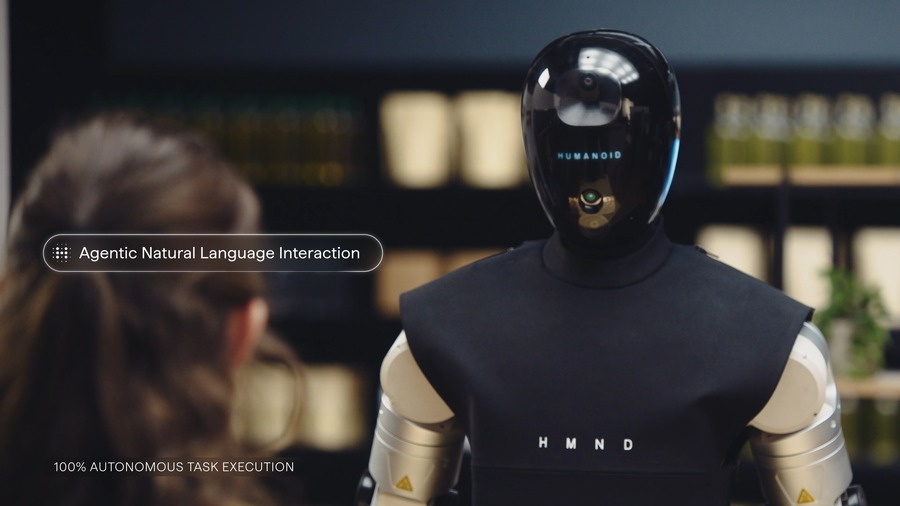
同社の車輪型ロボットは、小売、物流、製造業における店舗バックヤードでの食料品ピッキング、コンテナ取り扱い、梱包などの産業ワークフローを実行する。一方、二足歩行ロボットは、サービスおよび家庭向けの研究開発プラットフォームとして、音声対話、オンライン注文、食料品取り扱いなどをインテリジェントなアシスタントとして実演している。
System 3:群管理レベルの制御
最上位のSystem 3は、各ロボットをツールとして扱い、数秒以内に反応して群の運用を最適化するエージェントAI層だ。物流、小売、製造業の施設管理システムと統合され、サービスシナリオやスマートホーム調整にも適用可能である。
KinetIQエージェント群オーケストレーターは、タスクリクエスト、期待される結果、標準作業手順書、リアルタイムのリクエスト更新、施設コンテキストを取り込み、車輪型および二足歩行ロボット間でタスクと情報を割り当て、ワークステーションでのロボット交代を調整してスループットと稼働時間を最大化する。
施設システムとの双方向通信を指示し、新しいタスクリクエストや変更の受信、タスクの進捗とパフォーマンス指標の追跡、完了と問題の報告、従来型またはエージェント型施設管理システムとの連携による例外処理と解決を実現できる。

System 2:ロボットレベルの推論
System 2は、System 3によって設定された目標を達成するために環境との相互作用を計画するロボットレベルのエージェント層で、数秒から1分未満の時間軸で動作する。
この層は、オムニモーダル言語モデルを使用して環境を観察し、System 3からの高レベル指示を解釈する。固定された事前プログラムされたシーケンスに依存するのではなく、視覚的コンテキストから動的に計画を更新し、割り当てを完了するために必要なアクションとその最適なシーケンスおよびアプローチについて推論することで、目標をサブタスクに分解する。これらの計画は、将来再度実行され、群全体で共有されるワークフローや標準作業手順書として保存できる。
System 2は実行を監視し、VLA(System 1)が進捗しているかどうかを評価する。システムがタスクを完了できない、または支援が必要と判断した場合、群層(System 3)を通じて人間のサポートを要請する。支援は、System 2レベル(プロンプトを通じて)またはSystem 1レベル(遠隔操作または直接関節制御を通じて)での介入により、リモートまたは現場で提供できる。
System 1:VLAベースの低レベルタスク実行
System 1は、ロボットの身体部位のサブセット(手、胴体、骨盤など)の目標姿勢を指令し、System 2によって設定された即座の低レベル目標に向けた進捗を推進するVision-Language-Action(VLA)ニューラルネットワークだ。
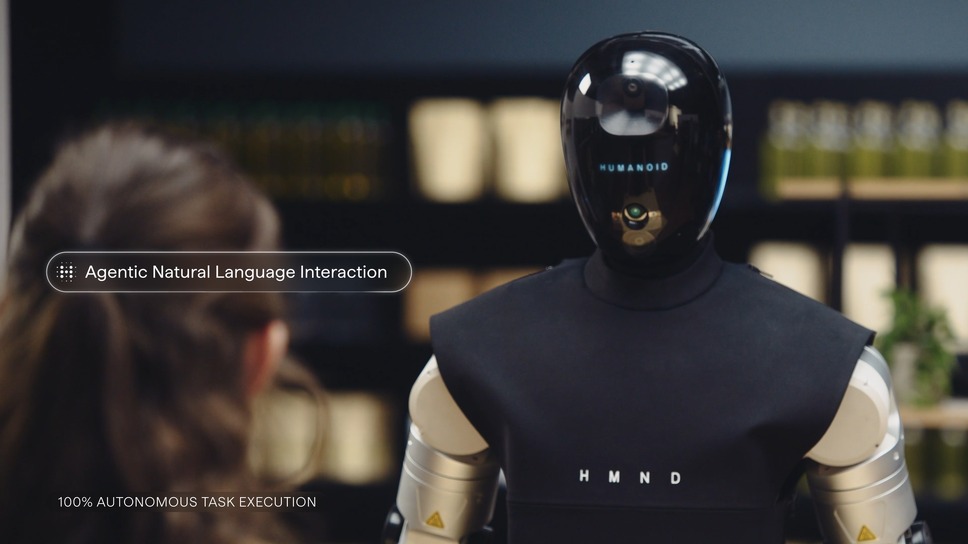
System 1は、異なるプロンプトを介して呼び出すことができる複数の低レベル機能をSystem 2に公開する。例としては、物体のピッキングと配置、コンテナの操作、梱包、移動などがある。System 2のVLMベースの推論は、現在の状況と目標に最も適した機能を選択する。各低レベル機能は、進捗追跡を容易にするために、そのステータス(成功、失敗、進行中)をSystem 2に報告することもできる。
KinetIQ VLAは、通常5から10Hzのサブ秒タイムスケールで新しい予測を発行する。各予測は、System 0によって実行される高頻度アクション(タスクに応じて30から50Hz)のチャンクを構成する。アクション実行は完全に非同期で、前のチャンクがまだ実行されている間に、常に新しいアクションチャンクが準備されている。
非同期に生成されたチャンクが、生成中に展開された現実と矛盾しないようにするため、KinetIQはプレフィックスコンディショニング技術を使用する。すべてのチャンク予測は、推論中に実行されると予想される前のチャンクの部分に条件付けられる。インペインティングとは異なり、これは自己回帰モデルとフローマッチングモデルの両方に等しく適用可能な普遍的な技術である。

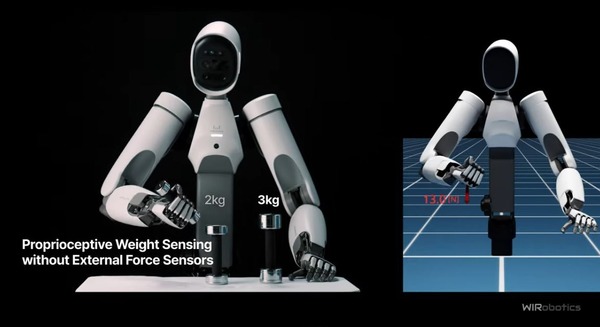
System 0:強化学習ベースの全身制御
System 0の目標は、動的安定性を継続的に保証する方法ですべてのロボット関節の状態を解決しながら、System 1によって設定された姿勢目標を達成することだ。System 0は50Hzで動作する。
KinetIQのSystem 0実装は、二足歩行型と車輪型の両方のロボットに対して強化学習で訓練された全身制御を使用する。このアプローチにより、KinetIQは異なるプラットフォーム間の相乗効果を完全に活用し、有能な移動コントローラーを生成する強化学習の力から恩恵を受けることができる。
全身制御は、シミュレーションのみでオンライン強化学習により訓練され、有能なモデルを生成するには約15,000時間の経験が必要となる。
フィジカルAI分野
複数の形態と時間軸にわたって一体となって動作するKinetIQの4つの認知層は、群オーケストレーション、推論、器用な操作、動的回復、安定性制御を必要とする複雑な目標を達成できる。
近年のAI分野におけるブレークスルーを取り入れたKinetIQの完全エージェント設計は、HumanoidがフィジカルAI分野で急速に進歩している主要な要因と言える。
「量子コンピュータ」を理解しよう【セミナー情報】
ロボスタでは、インフラ向けAIの最適化と、量子コンピュータ技術でリードする株式会社グリッドの代表取締役社長、曽我部 完氏が登壇するオンラインセミナー「量子コンピュータの進化と最新トレンド」グリッドが語る現状と社会実装までのプロセス」を、2026年2月18日(水)の15:00~16:20に開催します。
セミナーでは、量子コンピュータ業界の2025年総括、2026年に向けたトレンドと最新動向、量子関連の最新技術、日本の研究開発の状況と米中との比較などについて約30分間、曽我部社長にご講演いただきます。
講演の後は、ロボスタ編集長・神崎との対談を予定。量子コンピュータの基礎、量子コンピュータ登場後に懸念される暗号技術の崩壊と対策、量子とレガシーコンピュータの共存など、気になるテーマを深掘り。視聴者からの質疑応答コーナーも設けています。
まだまだ一般に知られていない量子コンピュータの基礎から現在地、最新動向や将来像など、わずか1時間あまりで把握できる貴重な機会です。ぜひふるってご参加ください。
先着50名に無料招待キャンペーンを実施します。お申し込みはお早めに。
セミナーの詳細とお申し込みはこちら。
ヒューマノイドとフィジカルAIがテーマのセミナーを開催
ロボティクス分野のトップランナーであり、ハードウェアとソフトウェアの両面に深い知見を持つ、アールティ代表取締役・中川友紀子さんを講師としてお迎えして、オンラインセミナー「ヒューマノイド×フィジカルAI最前線 アールティに聞くヒューマノイドの社会実装、現実と未来展望」を2026年3月10日(火)に開催します。

講演では、アールティの実績・導入事例、ヒューマノイド/四足歩行ロボットの実装ノウハウ等を紹介して頂きます。また、ロボスタ編集長・神崎との対談では、いま最も注目されている「ヒューマノイド」をテーマに、動画を見ながらの解説を予定しています。Unitree、Tesla、Figure などを例に、実際の映像を交えつつ、ハード/ソフト/プラットフォームの視点から分析し、わかりやすく解説します(※最新情報を重視するため、解説対象のメーカーやロボットは変更となる可能性があります)。
セミナーの詳細とご参加お申込みはこちらです。
【セミナー無料ご招待キャンペーンは満席になりました】
プレミアム会員の残席はあります。3ヶ月無料クーポンをご活用ください。
大好評「中国ヒューマノイド産業の最前線」を再開催
世界規模でダイナミックに進化しているヒューマノイド産業。その震源地のひとつが中国・深圳です。これまで最多の参加者を集め、定期開催を希望する声も多数寄せられた「中国ヒューマノイド産業の最前線」の第二回「中国ヒューマノイド産業の最前線 2026春 ~深圳から現地レポートと最新情報アップデート」を開催します。
本セミナーでは、ワイズイノベーションの吉川氏を再び迎え、2026年春時点の深圳の最新動向を深圳から解説して頂きます。
中国におけるロボット普及の実態、消費者の受容、報道・SNSの反応、政策支援、ヒューマノイドやフィジカルAI活用の盛り上がりなど、現地ならではの“肌感”を共有します。(お申込みはこちら)