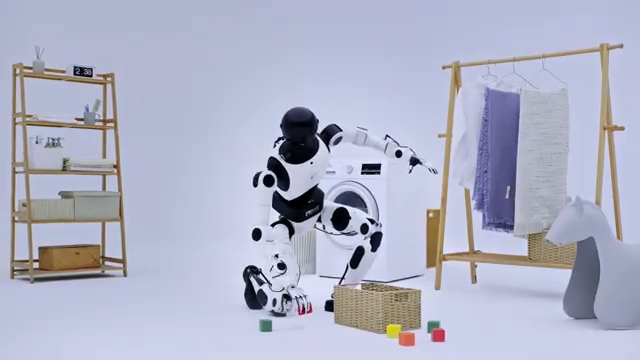
北京ヒューマノイドロボットイノベーションセンター(以下、X-Humanoid)は、最新の汎用ロボットプラットフォーム「Embodied Tien Kung 3.0」を正式に発表した。
同システムは、オープン性と実用性の向上に焦点を当てて設計されており、X-Humanoid独自の汎用エンボディドAIプラットフォーム「Wise KaiWu」を活用。
バランス、モーション制御、エンボディドな大脳・小脳協調、完全自律動作において大幅なアップグレードを実現した。
また、業界初の全身の高ダイナミックモーション制御と触覚インタラクションを統合したフルサイズヒューマノイドロボットとなっている。

開発と実用化における課題を解決
ヒューマノイド分野は現在、開発と応用において2つの主要な課題に直面している。
第1に、閉鎖的なハードウェアインターフェースが異なる動作環境への迅速な適応を制限していること。第2に、断片化されたソフトウェアツールと互換性のないプロトコルが冗長な研究開発を生み出し、商業展開とイノベーションを遅らせていることである。
Embodied Tien Kung 3.0は、オープン性と相互運用性を重視することでこれらの障壁に対処し、研究機関、大学、企業がより効率的にソリューションを開発・適応できるようにしている。
ハードウェアレベルでは、Embodied Tien Kung 3.0は、さまざまなエンドエフェクターやツールの柔軟な統合をサポートする複数の拡張インターフェースを備えている。これにより、専門的な作業、産業製造、商業サービスを含む多様なシナリオへの迅速な適応が可能となり、主流の業界システムとのシームレスな接続を確保。
ソフトウェア面では、Wise KaiWuエコシステム上に構築されたプラットフォームが、包括的なドキュメント、ツールチェーン、ローコード開発環境を提供している。
複雑な技術プロセスをユーザーフレンドリーなワークフローに簡素化し、ROS2、MQTT、TCP/IPを含む広く採用されている通信ミドルウェアとプロトコルをサポートする。
パートナーは、基盤システムを再設計することなく、ユースケース固有のカスタマイズを実行でき、開発サイクルを短縮し、複雑さを軽減できる。
オープンソース化による技術障壁の低減
現在までに、X-HumanoidはEmbodied Tien KungおよびWise KaiWuプラットフォームの主要技術をオープンソース化している。これには、ロボット本体、モーション制御フレームワーク、ワールドモデル、エンボディドVLMおよびクロスオントロジーVLAモデル、トレーニングツールチェーン、RoboMINDデータセット、ArtVIPシミュレーションアセットライブラリが含まれる。
これらのコンポーネントへのアクセスを拡大することで、オープンソースエコシステムはヒューマノイドロボティクスの反復と展開を加速し、技術障壁を低減し、企業、学術機関、研究者がより効率的にアプリケーションを開発できるようにしている。このアプローチにより、ヒューマノイドロボットはさまざまな業界ニーズに対応でき、スケーラブルで多目的な実装をサポートしている。
高度な身体性能とエンボディド・インテリジェンス
使いやすさはX-Humanoidの中心的な焦点であり続けている。これは、高度な身体性能とエンボディド・インテリジェンスという2つのコア機能によって実現されており、これらが組み合わさることで、ロボットは実世界のタスクで確実に動作できる。
物理的性能の面では、Embodied Tien Kung 3.0は高負荷アプリケーションに強力な四肢力を提供する高トルク統合ジョイントを組み込んでいる。
不均一な地形や雑然とした環境でも、十分なトルク出力が安定性を維持し、さまざまな動作条件下で一貫した動作を保証。
高い自由度と全身協調制御により、ロボットは1メートルの障害物を乗り越えたり、連続した高ダイナミックな動作を実行したりするなど、複雑な動きを実行できる。柔軟な胴体と広い上肢可動域により、狭い空間や制限された姿勢でも精度を維持しながら、跪く、曲げる、回転するなどの器用な操作が可能となっている。

さらに、多自由度四肢協調により、Embodied Tien Kung 3.0は正確な関節連動と微細な動作調整を実現している。
協調キャリブレーションはミリメートルレベルの操作精度を提供し、産業グレードの精度を必要とするユースケースに対応しながら、エラーを最小限に抑え、タスクの品質を確保している。

これらの機能はロボットの汎用性を強化し、複雑な環境における実用性を拡張する。
Wise KaiWuによる自律動作の実現
この高度な身体を支えているのは、汎用エンボディドAIプラットフォームWise KaiWuであり、Embodied Tien Kung 3.0がより高い自律性で動作することを可能にする。
このプラットフォームは、継続的な知覚-意思決定-実行ループを確立し、遠隔制御と人間の介入への依存を減らしながら、単一ユニット動作から複数ロボット協調へのシフトを推進。
高レベルの認知、つまり「何を」「なぜ」に対処するために、システムはワールドモデルやVLMなどのAIモデルを使用して視覚シーンを解釈し、言語指示を理解し、推論を実行し、複雑なタスクを段階的な計画に分解している。
リアルタイム制御では、VLAモデルと完全自律ナビゲーションが環境知覚、障害物回避、正確なアクション実行を管理し、可変条件下での安定したパフォーマンスを保証する。
Wise KaiWu上に構築されたマルチエージェント協調システムは、クロスプラットフォーム互換性と非同期タスク協調、そして自律スケジューリングを行う。
この集中型、マルチロボット、マルチ機能アーキテクチャは、エンボディド・インテリジェンスの研究から実用アプリケーションへの移行を示しており、実世界展開のためのスケーラブルで再現可能な道筋を提供している。
Embodied Tien Kung 3.0は、エンボディド・インテリジェンスの実世界への採用を加速し、ヒューマノイドロボットの商業および産業環境への統合を促進し、運用生産性を向上させるように設計された。