既存カートを即ロボット化する後付けAI自律走行キットで総務省「ICTスタートアップリーグ」に採択 CartFit 2026.6.17 Wed 11:00 CartFitは、総務省が推進するスタートアップ支援プログラム「令…
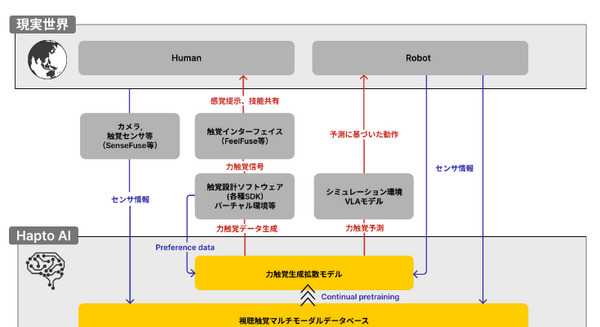
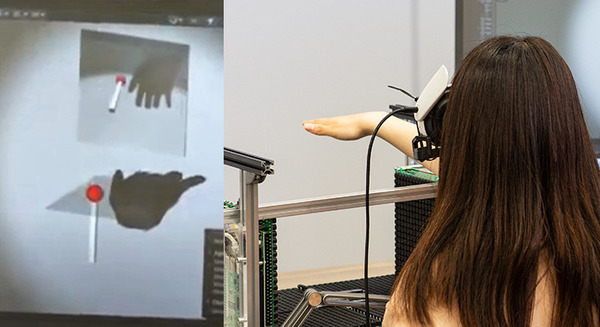
人間とロボットが相互に触覚データを収集・活用する「Hapto AI構想」を公開 東京大学発スタートアップのcommissure 2025.8.6 Wed 11:02 株式会社commissure(コミシュア)は、人間やロボットが触覚デ…
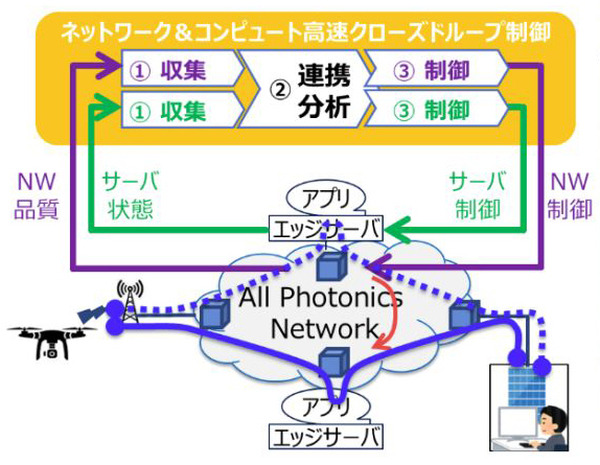
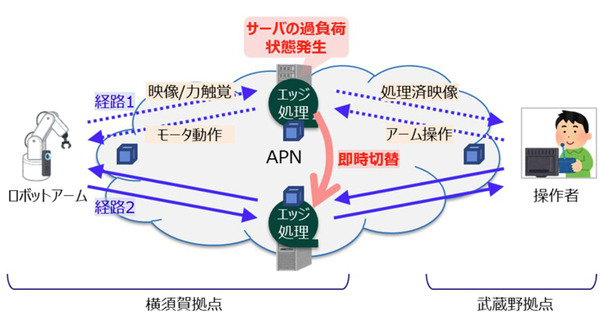
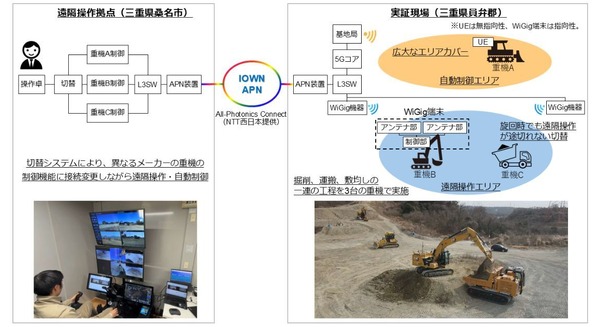
NTT・大成建設が実証実験で複数重機の遠隔操作に成功 IOWN APN・ローカル5G・WiGigを活用 2026.4.13 Mon 16:00 NTT、NTT東日本、大成建設は2026年4月10日、三重県内の2拠点間…
 既存カートを即ロボット化する後付けAI自律走行キットで総務省「ICTスタートアップリーグ」に採択 CartFit
既存カートを即ロボット化する後付けAI自律走行キットで総務省「ICTスタートアップリーグ」に採択 CartFit