人間の形を再現することと、人間の能力を実現することは同義なのか?
ヒューマノイド業界では、二足歩行や運動性能を競う開発競争が続いている。しかしGenesis AIが公開した新型ロボット「Eno」は、その前提に一石を投じる存在かもしれない。Enoは頭部も脚部も持たない独特な構造を採用し、「人間の形」ではなく「人間の能力の拡張」を目指して設計されたロボットだ。
一方でGenesis AIが今回発表したのはロボットだけではない。物理シミュレーションプラットフォーム「Genesis World 1.0」も同時に公開し、シミュレーション、学習データ生成、基盤モデル、ロボット本体までを一体で開発する戦略を打ち出した。これは単なる新製品発表ではなく、フィジカルAI時代における新たな開発スタックの提案とも言える。
FigureやTesla、Unitreeなどが人型ロボットの身体能力向上を競う中、Genesis AIはシミュレーションと知能基盤を起点とした異なるアプローチを示した。その成否はまだ未知数だが、ヒューマノイド開発競争の論点を「身体」から「データと知能」へ広げる発表として注目したい。
シミュレーターの精度と速度を同時に引き上げる「Genesis World 1.0」
「Genesis World 1.0」は、同社フルスタックスイートの第2弾リリースにあたる。コードはオープンソースとして公開されている。
ロボット開発においてシミュレーターに求められる要件は、速度と信頼性を両立することだ。現実の物理現象を忠実に再現できなければ、シミュレーション上で学習させたモデルを実機に移した際に性能が大幅に落ちる「シミュレーション・リアリティギャップ」が生じる。Genesis World 1.0はこの課題に正面から取り組んでいる。
中核となるのは、同社が新開発した「貫通なしIPCソルバー」(IPC: Incremental Potential Contact)だ。従来のシミュレーターでは、物体同士が接触する際に互いを貫通する誤りが生じることがあった。IPCソルバーはこれを数学的に保証して排除し、ほぼリアルタイムの計算速度を維持しながら剛体・変形体の双方を扱えるようにした。
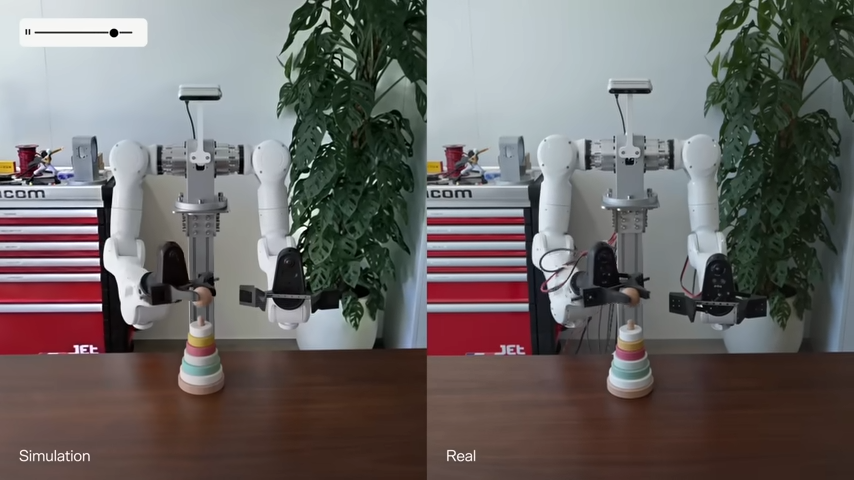
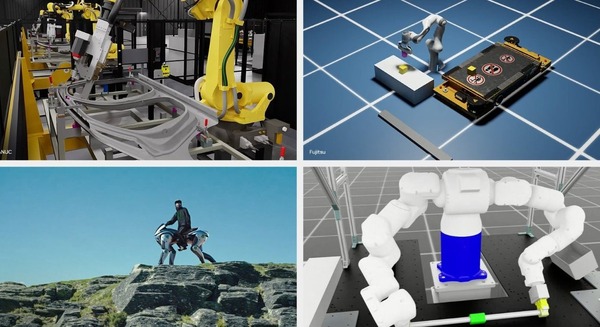
把持動作など接触が複雑なシナリオでも精度を落とさず動作するとされ、ゼロショット(追加学習なし)での「現実からシミュレーションへのモデル評価」を可能にするとしている。学習済みモデルをシミュレーター上で即座に検証し、現実のロボットに展開する開発サイクルを大幅に短縮する可能性がある。
計算基盤には「Quadrants」と名付けられたGPU加速のクロスプラットフォームコンパイラを採用した。オープンソースの物理シミュレーションフレームワーク「Taichi」のフォークとして出発し、シミュレーションワークロード向けに主要部分を大幅に再構築したという。前世代のGenesisリリースと比べて起動時間が10倍短縮され、実行性能は最大4.6倍向上したとされる。
知能とハードウェアを社内一貫開発する「Eno」
もう一つの発表が「Eno」(エノ)だ。Genesisが手がける初のエージェンティックロボットで、AIエージェントと汎用ロボットを一体として構成したシステムと位置づけられている。
Enoは「人間の形に似せるのではなく、人間の能力を拡張することを目的に設計された」と説明されている。外形は人型とは異なる。現実世界での推論・計画・行動の実行を目標としており、布の把持・展開といった変形する物体を扱う作業も実演されている。


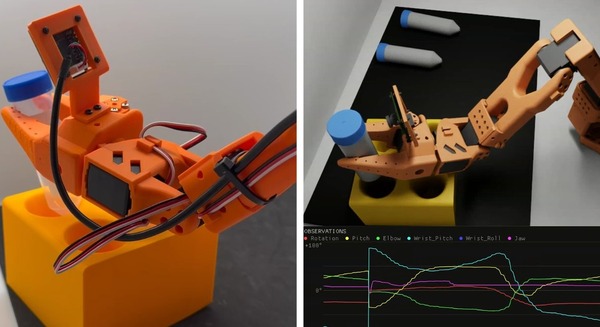
特徴的なのは、ハードウェアからソフトウェアまでの垂直統合だ。シミュレーター(Genesis World)、基盤モデル(GENE)、データエンジン、多指ハンド、そしてロボット本体まで、すべてGenesis社内で開発されている。センサーからアクチュエータ、知能処理まで一社が設計することで、ソフトウェアとハードウェアを密接に連携させられるとしている。
シミュレーターとロボットを同一スタックで開発する意義
今回の2つの発表は、別々の製品リリースではなく、Genesisの開発戦略を一体として示している。
シミュレーターの精度が高まれば、ロボットの学習データをより多く・より速く生成できる。そのデータで訓練した基盤モデルが搭載されれば、実機の性能が上がる。性能が上がれば、現実の動作データがシミュレーターの改善にフィードバックされる。
シミュレーターはオープンソースとして公開されるため、研究機関や開発者はロボット開発を行う環境構築に活用できる。