産業用ロボット業界で注目され、飛躍的に業績を伸ばしつつある日本のベンチャー企業がある。ロボットコントローラの開発メーカー「株式会社MUJIN」(ムジン)だ。
筆者がMUJINの名前を最初に目にしたのは「第7回ロボット大賞」で、「完全ティーチレス/ばら積みピッキングMUJINコントローラ『PickWorker』(ピックワーカー)」が経済産業大臣賞を受賞したときのことだった。

受賞の後すぐ、配送センターにピッキングの産業用ロボットが本格導入されるというニュースが入った。それまで、配送センターにはピッキング・ロボットの導入事例はなく、初めての導入は2016年12月のこと、アスクルが配送の自動化を徹底する上でピッキング・ロボットの稼働に踏み切ったのだ。
コンテナ単位で在庫商品の管理を行い、ロボットは注文通りに商品を正確に在庫用コンテナから取り出し、配送先ごとにコンテナに仕分けして入れる。これを可能にするコントローラーを開発したのが「MUJIN」だ。
■MUJINコントローラによるピースピッキングのデモ動画(音声なし)
ロボット・コントローラとはなにか?
テーブルに置かれたものを手にとり、顔の近くまで持って来てじっくり見る、そんな動作をするのに人間は「肘や手首、指の関節をそれぞれどのように動かそうかな」なんてことを意識したりはしない。しかし、産業用ロボットではそれぞれの関節をどのタイミングでどの程度動かすかを細かく指示する必要がある。何かの作業を行わせるには、「ティーチング」(ロボットティーチング)を行い、それを繰り返し実行することでロボットは正確に作業を行うことができる。一般にティーチングはティーチングマンと呼ばれる特別な技能者が行う。
「産業用ロボットでは、動きを教えるのに1年もの長い期間がかかるティーチング作業も珍しくない」と、MUJINの広報を担当する山内氏は言う。しかし、MUJINのロボットコントローラを導入することによって、このティーチングの作業が必要なくなり、ロボットを導入してから稼働するまでの期間を著しく短縮できると続ける。
山内(敬称略)
日本の労働人口は日々、約2千人ずつ減っています。
労働人口はこの先もどんどん減っていくと見られているので、その現実を見れば、自動化による効率アップによって、少ない労働力を補っていく必要があることは明らかです。例えば、物流業界は人不足が既に深刻な状態であることは報道されているとおりです。
すなわち、今後、限られた人的リソースでより高い生産性を目指すには、さまざまな分野においても「ロボットが必須」の時代に入っていると言えます。ロボットなら深夜や長時間の連続稼働に対応したり、過酷で危険な現場であっても作業ができる、といったさまざまな利点もあります。
編集部
産業用ロボットの導入は「既に普及している」と言っていい状態なのでしょうか
山内
日本はロボット大国と呼ばれ、製造業の分野では産業用ロボットの導入によって、早くから自動化が行われてきたことは皆さんもご存じの通りです。しかし、それでも従業員の人数に対してロボットの割合はまだ低く、100人に対してロボット1台、という状況です。
産業用ロボットの4大問題
編集部
産業用ロボットは正確な作業を繰り返し長時間こなせるという、明らかなメリットがありますよね。それなのに普及が進まないのは何か課題があるのでしょうか。
山内
はい、産業用ロボットにも大きな課題があります。それを弊社では「4大問題」と呼んでいます。
ひとつめが産業用ロボットのメーカーによって操作方法が全く違う、ということです。ロボットの機構や性能はそれほど変わらないのに、コントローラの制御方法が異なるので操作方法が各社でバラバラです。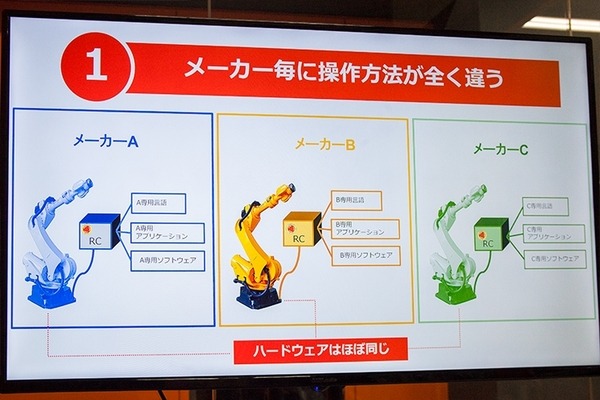
編集部
ロボットはメーカーごとに操作方法が異なるのが実状だということですね。
山内
はい。ふたつめは、ロボットに作業を覚えさせる「ティーチング」作業が難しく、とても長時間かかる、ということです。ティーチングに一年かかるということも珍しくありません。また、ティーチングはプロが行うことが前提のため、今までは簡単に短時間で覚えさせたり、ちょっとした変更を迅速に行う、といったことができませんでした。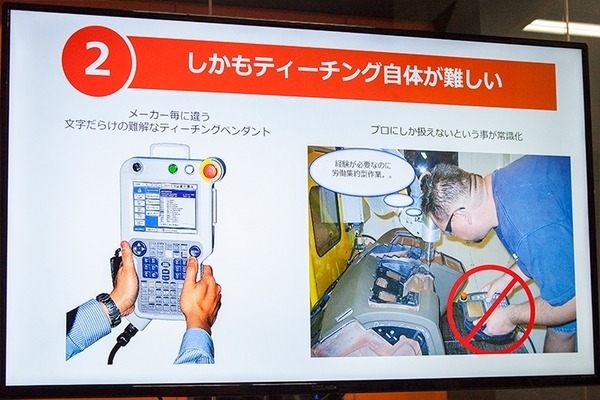
3つめとして、ロボットは同じことを正確に繰り返し行うことが得意な反面、教わっていないことはできない、ということです。賢くない、知能化が難しい、と言われてきました。
こういった事情が背景にあり、普及も進まないので、ロボットメーカーが新しく参入することも困難になっています。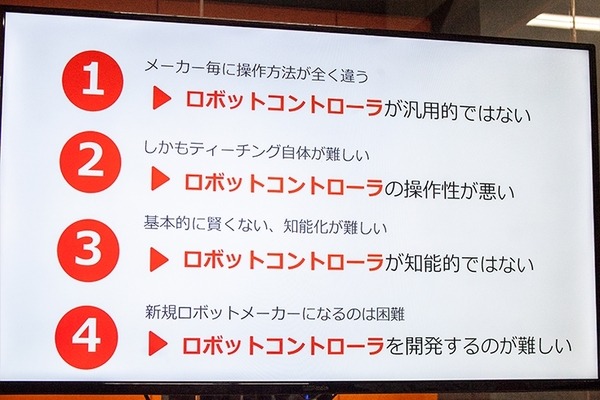
編集部
なるほど。4大問題を解決すると、ロボットの活用範囲が拡がったり、短期間での導入が可能になりそうですね。
山内
これらすべての問題を解決する鍵は「ロボット・コントローラ」が握っています。ロボット・コントローラが操作性がよく、知能的で、汎用的になれば、ロボットがもっと導入しやすくなり、普及が進み、新規ロボットメーカーも参入しやすくなり、ロボット業界の活性化に繋がる、そう考えています。
MUJINは、産業用ロボットが普及しないという課題は、「汎用的で知能的なロボットコントローラ」の開発によって解決できると考え、自社で「次世代汎用ロボットコントローラ」を開発した。
どのロボットにも使えて、誰でも簡単に使えて(ティーチング不要)、ロボットを知能化することを目標にした「MUJINコントローラ」だ。汎用ロボットコントローラが普及することで、ロボットアームを製造するロボットメーカーの新規参入も支援できるとしている。
ばら積みピッキングを可能にしたMUJINコントローラ
例えば、日本には世界屈指の産業用ロボットのメーカーがたくさんある。それらのロボットには制御するためのロボットコントローラが搭載されているが、ロボットメーカー各社が専用のものを用意し、重要な付属機器として納入され、プロのティーチング担当者が設定を行う。それ故に操作性や制御の方法もメーカーによってすべて異なっていて、共通化はされていない。

MUJINは、メーカーの産業用ロボットとコントローラに追加するカタチで導入する。導入する工場や企業にとっては余分なコストになるのだが、それでもそれらの企業がMUJINコントローラを導入するにはそれなりのメリットがあるはずだ。
山内
例えば、自動車メーカーの製造工場で産業用ロボットが働いている映像を観たことがある人も多いと思います。それらはロボットが溶接をしたり、塗装をしているシーンが多いのではないでしょうか。溶接や塗装は、同じ箇所を同じように正確に行い、それをラインに流れてくる車両に繰り返し行う作業です。正確に繰り返す作業はロボットに適しています。ティーチングで教えられたとおりを確実にこなすことができるからです。
一方で苦手な作業のひとつに、「ばら積みピッキング」があります。例えば、ネジや部品、商品などが無作為に積まれたヤマの中から、部品をひとつずつピックアップして別のコンテナやスライダ等に移す作業です。これには、無作為に積まれた、または無作為に置かれた状態から部品の姿勢を正確に解析し、つまむのに適した部分を判断してそこをピックアップする作業が求められます。人間であれば簡単だと思われることでも、状況を判断して、それに応じて作業することは今までのロボットには難しかったのです。ロボットが「知能的ではない」と言われてきた理由のひとつです。
なるほど、ロボットには困難だとされていた「ばら積みピッキング」もMUJINのコントローラは難なくこなしている。
ばら積みピッキングの様子は下記の動画がよくわかる。MUJINコントローラーを使ったロボットが正確に部品をピッキングし、つかんだ部品の向きに合わせて、置き場所を選択して置いている。フラッシュしている光は、ばら積み部品の位置や姿勢を正確に把握するため、プロジェクタによる3Dカメラで確認している様子だ。
■MUJINコントローラによるばら積みピッキングの動画
山内
MUJINコントローラを導入することで「知能化」することができます。例えば、ばら積みピッキングをロボットにティーチングするのは細かい設定作業が必要です。この画面のようにばら積みされた部品をひとつずつスライダに移動する作業の場合、部品の向きや傾きには膨大なパターンがあります。一般のコントローラでは、あらゆるパターンに応じてピッキングする方法をティーチングしていきます。ティーチングが完了するまでの期間に、1年近くもかかるケースも珍しくありません。
既に知能化されているMUJINコントローラを導入することで、簡単な設定だけ、ティーチレスでロボットを導入することができます。すなわち、ロボットを導入してから稼働開始までの期間を著しく短縮することができます。
ロボットの知能化とティーチレスの実現
「知能化」には2つのポイントがある。ひとつはばら積み部品の状態を正確に把握すること。もうひとつは部品を正確に持って、正しい位置に置くことだ。
ばら積み部品の把握には、ロボットの頭上に設置されたカメラとプロジェクタ照射映像を活用して、三次元で状態把握を行っている。ばら積みの状態から個々の部品がどのような向きで積まれているかを判断し、どこを持ってどこに置くか、障害物はないかなどの判断をコントローラが自律的に迅速に行う。これによって、ロボットは状況に応じて部品を正確につまみ上げ、所定の位置に部品を移動させることができる。
では、MUJINコントローラでは、なぜ「ティーチング不要」(ティーチレス)が実現できるのか。
なぜ個々の関節やサーボの制御をロボットに教えることなく、部品を把持して移動させることができるのか。
それには人工知能技術のひとつ「モーションプランニング」が使われている。
今後はこのモーションプランニングという珍しいAI技術について、更には同社が展望する全自動の物流センターへの取り組みについても聞いていきたい。
株式会社MUJIN 公式ホームページ