国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託事業「人と共に進化する次世代人工知能に関する技術開発事業」において、株式会社国際電気通信基礎技術研究所(ATR)、国立大学法人京都大学、国立研究開発法人産業技術総合研究所(産総研)が共同で、人工知能(AI)搭載ヒューマノイドロボットの開発に取り組んでいる。今回、ATRが開発中の「サイボーグAI」を搭載したヒューマノイドロボットが、人の運動の転移(みまね)学習することで、人並みの実時間運動性能を達成した。
ヒューマノイドロボット開発の背景と課題
高齢化や労働者人口の減少が進む中、人と同程度の自由度を持つヒューマノイドロボットの安全かつ安心な利活用は急務となっている。これまで、AIによる物体認識や把持の成功率は向上し、高い運動能力を持つロボットの制御技術も発展してきた。しかし、民生用の安価なモーターを用い、自由度が高いロボットに人の運動をリアルタイムでみまねさせる技術は未だ実現されていない。
「サイボーグAI」開発プロジェクトの詳細
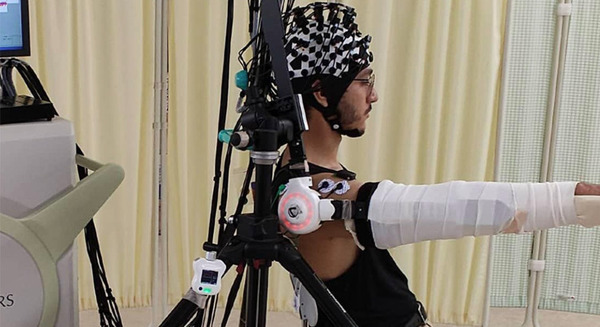
2020年度からNEDOがATRに委託し、京都大学や産総研と連携して進めてきた本事業では、人と同程度の俊敏な身体性と実時間での意思決定能力を持つヒューマノイドロボット搭載用AI「サイボーグAI」の基盤技術開発を目指している。これに伴い、京都府精華町のATR敷地内に「ロボットスケートパーク」と呼ばれる実験環境を整備した。ここでは人の脳波や筋電、モーションキャプチャなどの生体信号を同時計測しながら、ヒューマノイドロボットの学習実験を並行して実施する。
実験成果
今回の成果では、「サイボーグAI」搭載ロボットが人の複雑なスケートボード運動をみまね学習し、前後・左右方向の身体制御や体軸の傾きからの回復など全身の動きを再現した。これにより、スラローム運動などの難易度の高い運動を転倒せずに実時間で行うことが可能となる。ロボットは人と異なる身長や体重を考慮し、単純なコピーではなく自身に適した動きに修正しながら学習している。
NEDOとATRは、本事業の成果を基に、介護・介助・リハビリや個別輸送・運搬など労働集約性の高い分野での応用技術開発を進めるとしている。