
大阪工業大学は2025年11月6日(木)、ロボット工学科の大須賀公一教授らの研究グループが、地震や豪雨で発生する土砂災害「河道閉塞」の現場で活動するロボットシステムを開発したと発表した。
このシステムは、複数の機材を現地の状況に応じて組み替えながら調査や復旧作業を行うもので、遠隔操作によって作業員の安全を確保し、二次被害のリスクを低減することが期待される。
河道閉塞の危険性と従来の課題
河道閉塞は、地震や豪雨による地滑りやがけ崩れで発生した土砂が川をせき止める現象で、「土砂ダム」とも呼ばれる。上流側に水が溜まることで浸水被害が発生するほか、溜まった水が一気に決壊すると下流に大規模な土石流を引き起こし、甚大な二次被害につながる危険性がある。
実際に、2024年1月に発生した能登半島地震では14カ所で河道閉塞が発生し、同年9月の豪雨でその半数が消失、下流域の被害を拡大させた可能性が指摘されている。また、台湾で発生した水害も、先行した台風で形成された河道閉塞の決壊が原因とされている。
河道閉塞はアクセスの困難な山間部で発生することが多く、大型重機の搬入が難しい。そのため、これまでは二次被害の危険と隣り合わせの状況で、人力による対応に頼らざるを得ないという課題があった。
ヘリで運搬、現場で組み替える新システム
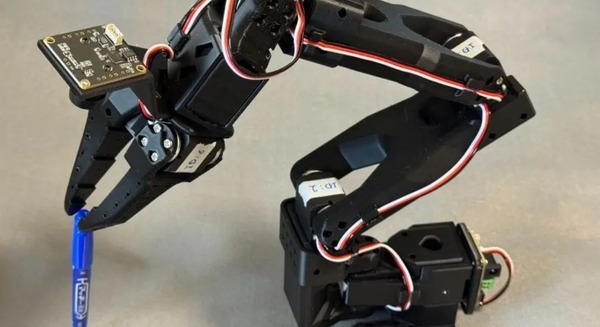
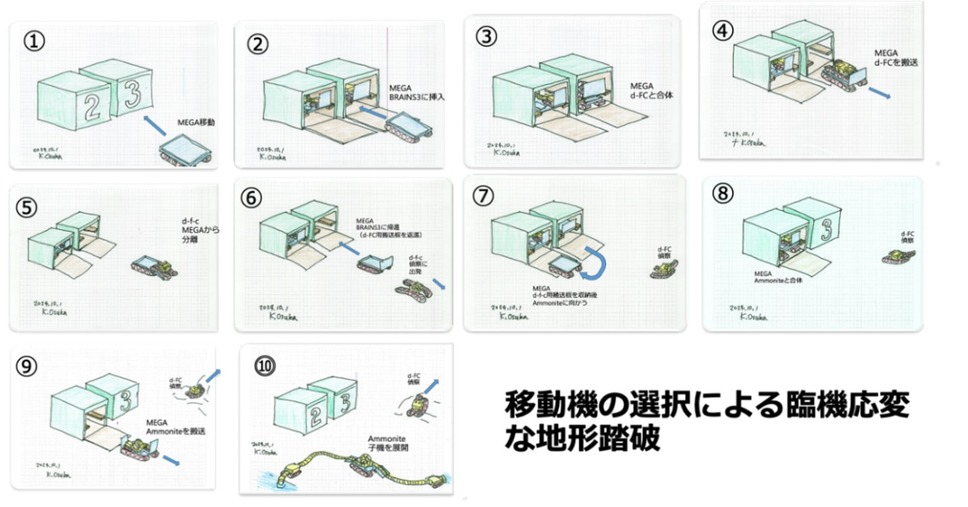
今回開発されたロボットシステムは、こうした課題を解決するために設計された。システムを構成する機材は、ヘリコプターで運搬可能な重量1t程度の小型ユニットに分割されており、コンテナで現場まで搬入する。現場では、状況に応じて必要な機材を組み替えることで、偵察や排水といった異なる作業に1つのシステムで対応できるのが大きな特長だ。
本研究は、内閣府および科学技術振興機構が推進するムーンショット型研究開発事業・目標3「多様な環境に適応しインフラ構築を革新する協働AIロボット」の一環として進められており、多様な環境に適応しインフラ構築を革新する技術としての貢献が期待される。