JR東日本ビルテック株式会社は9月10日(水)より、東京駅において四足歩行ロボットを活用した設備点検の実証実験を開始した。この取り組みは、ロボット開発を手掛けるTechShare株式会社と共同で実施するもので、将来的には首都圏の駅を中心に幅広く展開することが検討されている。
点検業務の質と効率を向上させる新技術
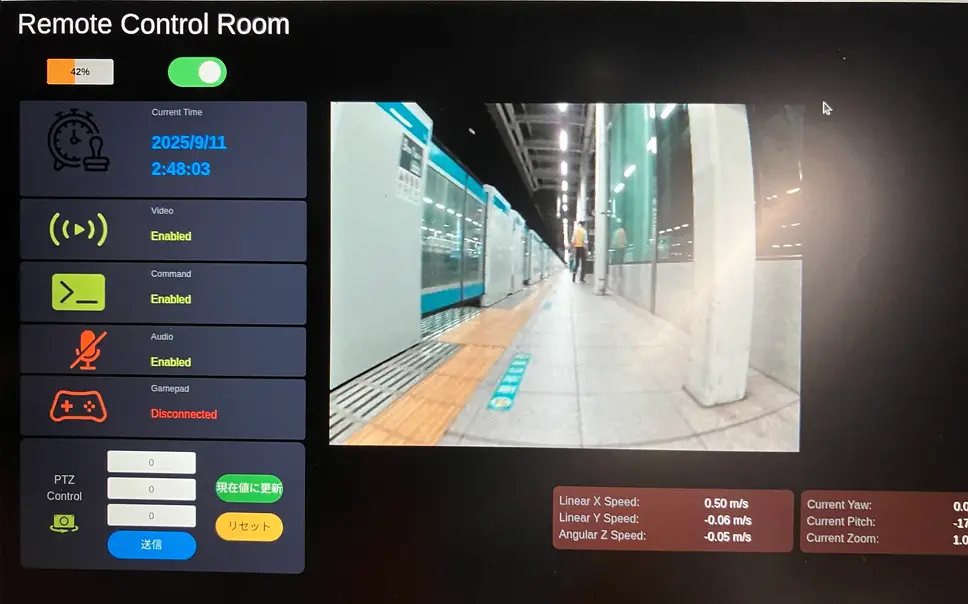
今回導入された四足歩行ロボットは、unitree社の歩行ユニット「Go2-W」と、TechShare社が開発した自立歩行制御ユニット、3D Field Navigator「PatRobot」で構成される。機体にはカメラや3D LiDAR(ライダー)が搭載されており、事前に設定した巡回ルートを自立走行しながら、通路や設備の状態を詳細に記録することが可能だ。
従来の人による目視点検は、経験や知識によって点検結果にばらつきが生じる可能性があった。また、異常を発見することを主目的とするため、必ずしも毎回同じルートを辿るわけではない。一方、ロボットは記憶させたルートを正確に巡回するため、定点観測による精度の高いデータを安定的に取得できる。これにより、点検品質の平準化と、人の目では見逃しがちな微細な変化の早期発見が期待される。この取り組みは、従来の作業を単に模倣するのではなく、ロボットの特性を活かして点検の質と効率そのものを向上させることを目指している。



労働力不足を背景に、人とロボットの協働へ
施設管理事業を展開するJR東日本ビルテックは、以前から労働力不足への対応と、利用者の安全・安心を維持するという課題に直面していた。今回の実証実験は、人とロボットが協働することで、駅の維持管理における持続可能性を高めることを目的としている。
共同で実験を行うTechShare社は、これまで鉄道業界での導入実績はなかったものの、駅の建物構造が四足歩行ロボットの性能を実証するのに適していると判断した。特に、構造が急激に変化せず、高低差が大きいという駅特有の環境が、自社開発の三次元SLAMの検証に向いていたという。
JR東日本ビルテックは、専門的なプログラミング知識がなくとも運用できるロボットを求めていたところ、TechShare社がシステムとユーザーインターフェースを構築したベータ版を提供していたことから、今回の共同実験が実現した。