パナソニック アドバンストテクノロジー株式会社、東海旅客鉄道株式会社(JR東海)、スズキ株式会社の3社は、超電導リニアの運行を支える機械設備の点検・保全業務を効率化するため、外観検査を自動で行う設備検査ロボットの試作機「Minerva(ミネルヴァ)」を共同開発したと発表した。
今後、山梨リニア実験線での検証を経て、実用化を目指すとしている。
リニアの安全運行を支える点検業務の課題
リニア中央新幹線の実験線には、分岐装置や乗降装置といった特有の機械設備が多数存在する。これらの設備は広範囲に点在しているため、作業員が点検箇所まで移動するのに長時間を要していた。さらに、分岐装置の下部など狭い場所での点検作業は、体に大きな負荷がかかる姿勢を強いられるなど、作業員の負担が大きな課題となっていた。
将来、リニア中央新幹線が開業すれば、同様の点検業務を沿線各地で広範囲に行う必要があり、設備の点検には膨大な労力がかかると想定される。JR東海は、こうした背景と将来の労働力不足を見据え、業務効率化を目的としてロボット導入の検討を進めてきた。
異業種3社の技術を結集した「Minerva」
今回開発された「Minerva」は、異業種3社の技術を結集して開発された。
車体には、スズキが開発中の多目的電動台車「MITRA」を鉄道業界で初めて採用。電動車いすの開発で培った技術により、段差や砂利道などの不整地でも安定した走行が可能だ。この車体にロボットアームなどの各種部品が搭載されている。

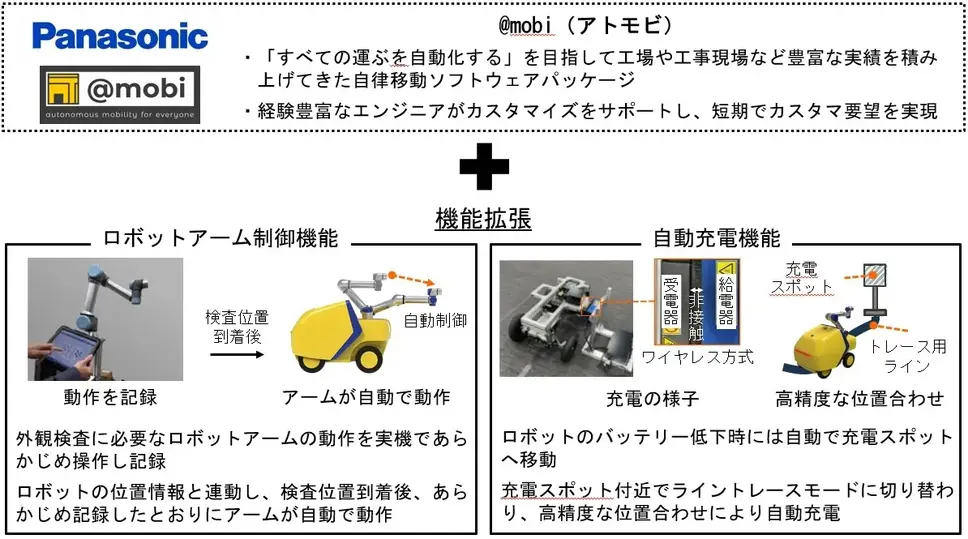
制御システムには、パナソニック アドバンストテクノロジーが提供するソフトウェアパッケージ「@mobi」が採用された。これも鉄道業界では初の事例となる。このソフトウェアにより、センサーやコントローラーが統合され、狭い場所でも安全な自律移動を実現する。さらに、ロボットアームの制御機能や自動充電機能も備え、人の介在を最小限に抑えた外観検査の自動化を可能にする。
デザインは、プロダクトデザイナーの森澤有人氏が担当。2025年1月に引退したドクターイエロー(T4編成)をイメージしており、親しみやすさを感じさせるシンプルな造形が特徴だ。

期待される効果
3社は2026年2月より、山梨リニア実験線で「Minerva」の機能性確認などの現地検証を開始する計画。
将来的には、リニア中央新幹線の沿線各地に設備検査ロボットを配置し、外観検査を自動化することで、作業員の移動時間や点検にかかる労力、身体的負担を大幅に削減する効果が期待される。