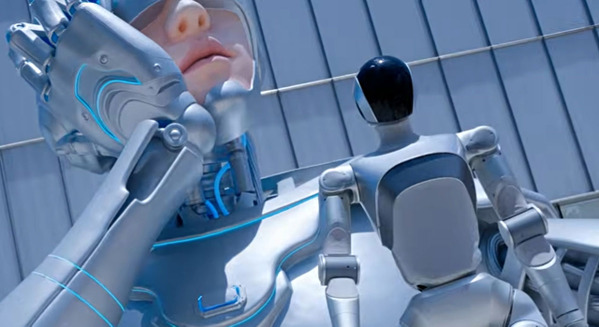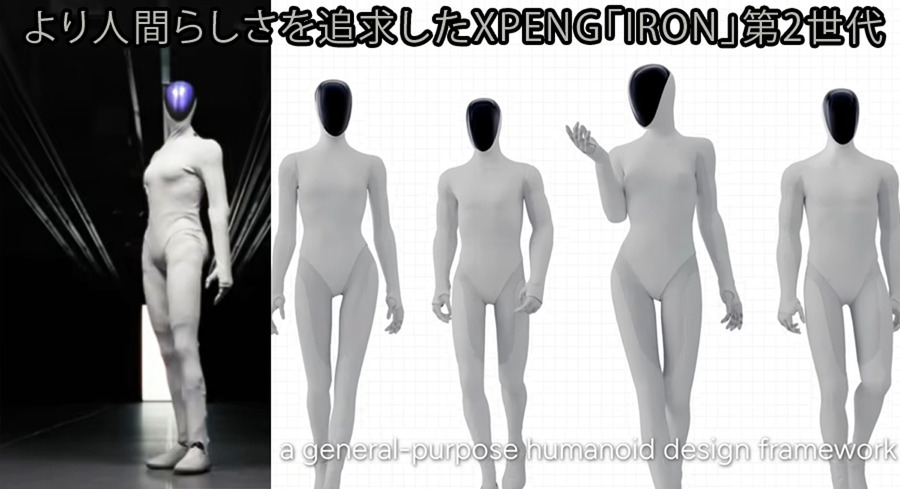




中国を拠点とするXPENGは、ヒューマノイドロボット「IRON」の第2世代を発表した。人間の身体構造を忠実に再現し、より自然で人間らしいインタラクションを実現することを目指した設計となっている。
汎用ヒューマノイド設計フレームワークの構築
同社は「可能な限り人間らしいロボット」の創出を目標に掲げ、インダストリアルデザイン、機械工学、モーションコントロールなど複数の分野を統合した開発を進めてきた。その中核となるのが「汎用ヒューマノイド設計フレームワーク」だ。
このフレームワークは単なる外観デザインの指針ではなく、ロボットのバランス、表現力、サイズや用途が異なっても一貫性を維持するための「身体の論理」そのものだという。人間の解剖学に基づく深いバイオミメティクス研究を行い、その後、堅実な工学的最適化を重ねることで開発された。
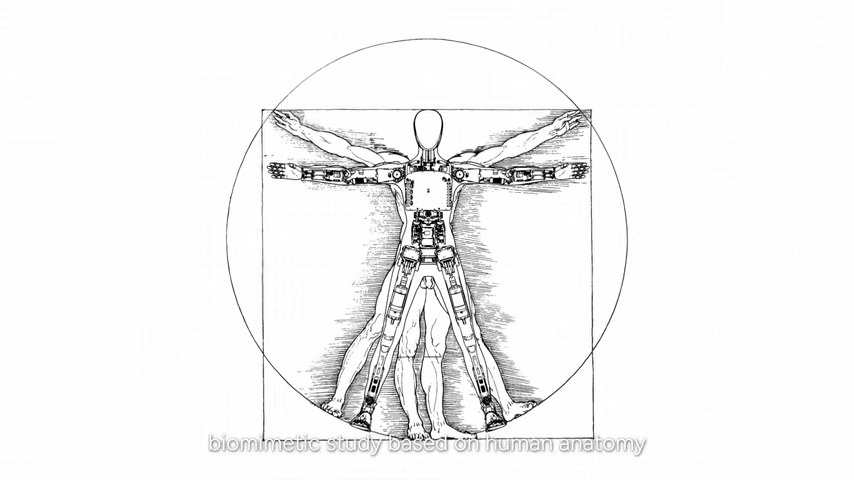
人間の身体構造を模倣した機構設計
開発において同社が重視したのは、人間の身体が持つ広い可動域の再現だ。靭帯、筋肉、骨が連携することで生まれる動きの仕組みを徹底的に研究し、ロボットを可能な限り人間らしく動かすことを目指した。
特に注目されるのは、実際の人間の背骨に近い構造を持つ関節設計だ。単純な回転関節ではなく、冗長な自由度を持たせることで性能向上を図った。腰・骨盤・股関節の空間的な関係性は、人間の運動データに基づいて厳密に設定されており、骨盤を持ち上げたり、腰を移動させたりする動作が機械的に感じられない滑らかさを実現している。
ラティス構造による筋肉の再現
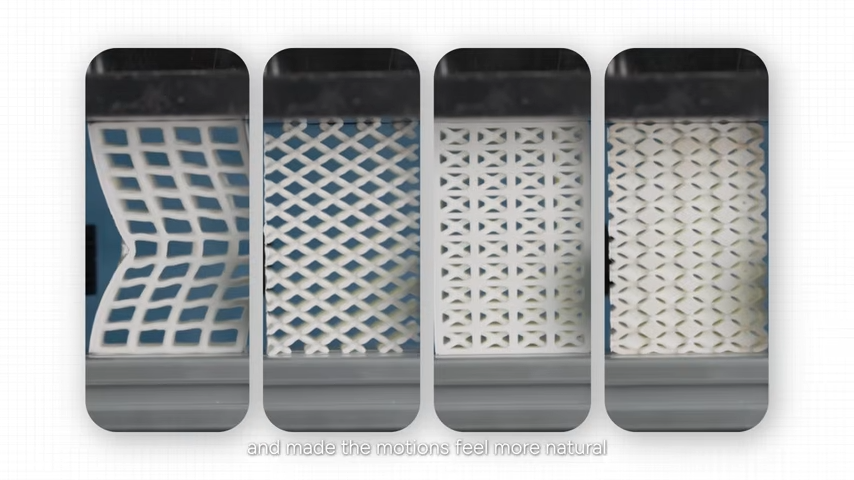
骨格の次に取り組んだのが「筋肉」の実装だ。スポンジやシリコンなど様々な素材を試した結果、レタスのおもちゃからヒントを得て、柔軟な中空構造を持つラティス(格子)構造を採用した。
この構造は伸び、圧縮され、熱を放出するという、本物の筋肉に近い振る舞いをする。関節ごとに異なる格子構造を設計し、圧縮がかかる部分にはより柔らかい素材を、剛性が必要な部分には弾力性の高い素材を使用することで、内部抵抗が減り、動きがさらに自然になった。
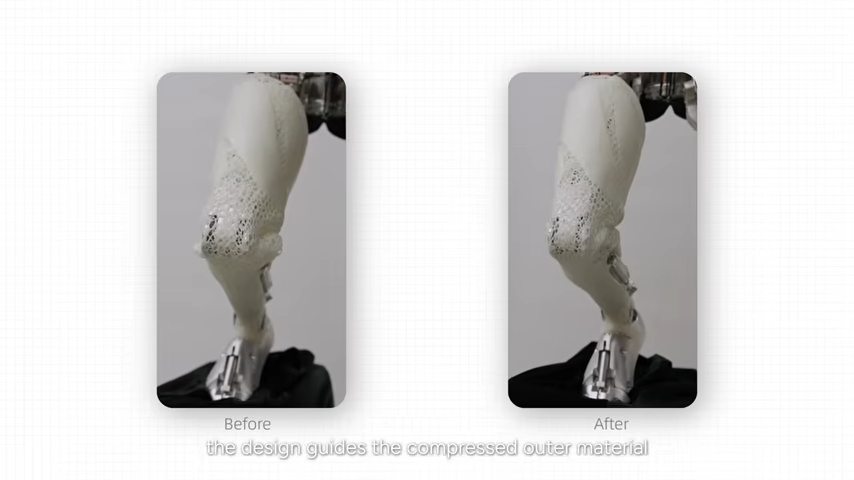
各関節の内面形状も最適化され、柔らかい素材がフレームに密着しながらも、制御された柔軟な動きのための空間を確保している。例えば膝関節では、IRONが脚を曲げたとき、外側で圧縮された素材が内側の空間へと導かれ、動作中も脚の形状がなめらかに保たれる設計となっている。
人間の皮膚に近い外皮システム
ロボットにとって「皮膚」とは、構造・機能・美観が密接に融合したシステムだと同社は説明する。身体の機能をマッピングし、それに対応する異なる内部構造を設計した。
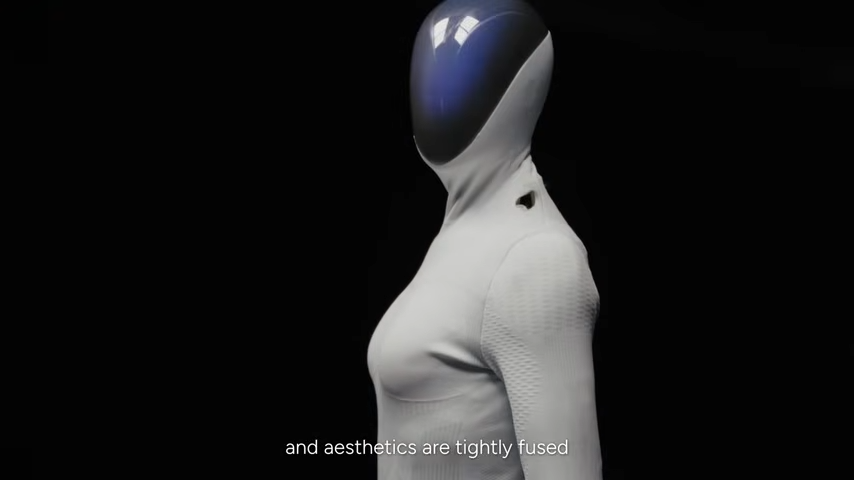
ロボットが動くとき、この弾性を持ったフィット感のある皮膚は、内部の格子構造とともに動き、構造・表面・運動を常に同期させる。同社にとって皮膚は単なる覆いではなく、ロボットの構造、動き、そして視覚的表現を一体化し、ひとつの「生きている存在」として感じさせるための要素だという。
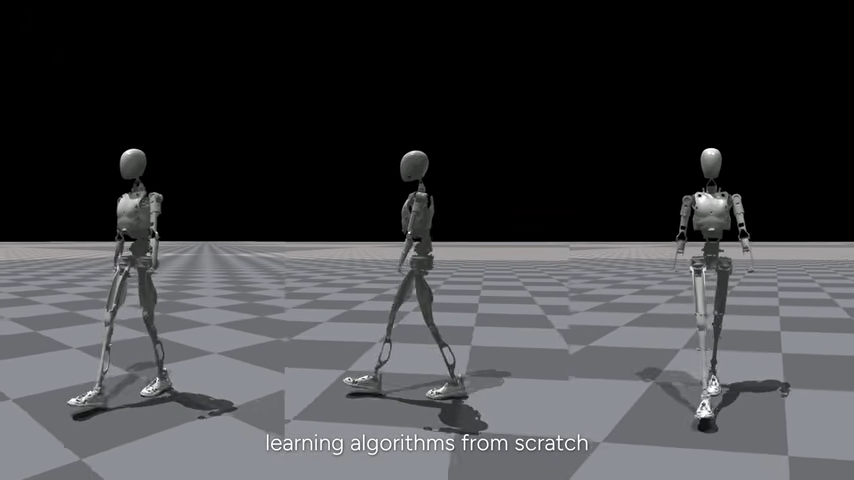
強化学習による動作制御の最適化
ハードウェアの開発と並行して、同社は強化学習アルゴリズムを一から再構築し、極めて堅牢なモーションコントローラを訓練した。その結果、筋肉構造や皮膚素材が変化しても、ロボットは滑らかで人間らしい動きを維持できるようになった。
課題となったのは、ラティス素材特有の性質だ。その動的効果を効率的にシミュレーションすることが非常に困難で、筋肉がシステム全体のダイナミクスにどのような影響を与えるのか、正確に把握できなかった。
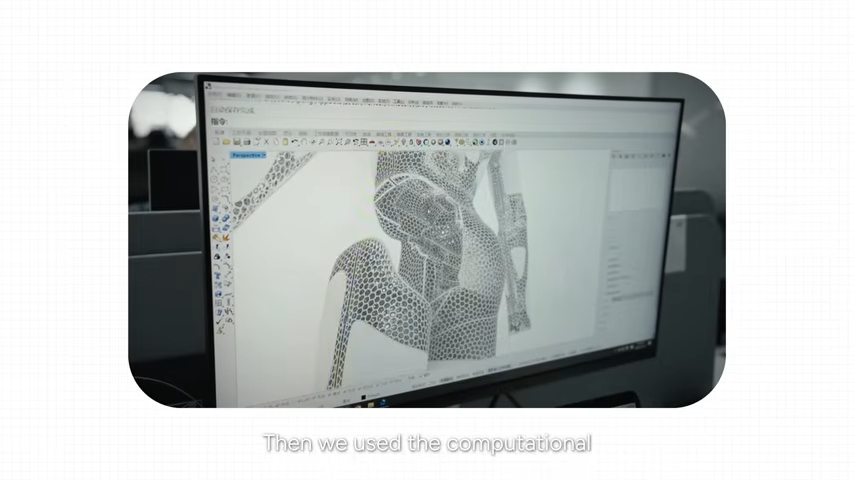
この問題を克服するため、同社は膨大な動的データを収集し、筋肉構造に特化した独自のシステム同定アルゴリズムを開発した。さらに計算手法を用いて構造を最適化し、ロボットモデルのパラメータを精密にキャリブレーションすることで、ラティス構造の効率的なシミュレーションを可能にした。
美しさと機能性の両立
同社は、エンジニアリングとデザインは本来、自然に噛み合うものではないとしながらも、機構と美しさの間にある「最適なバランス」を見出すことが最大の課題のひとつだったと説明する。
ヒップラインでは、ほぼ黄金比に近い、滑らかで自然な曲線を目指した。しかし、従来のアクチュエーターは大きすぎて重く、身体の曲線を損ねてしまう。そこでエンジニアたちは、より小型で軽量、かつカスタム設計されたアクチュエーターを提供し、実際の人間の筋肉構造に基づいてプロポーションを動的に調整できるようにした。
こうして同社は、工学的制約と美しさの間に理想的なバランスを見出した。わずか数ミリの曲線であっても、妥協はしない。それこそが、IRONという存在を定義しているという。

人間らしい動作の実現
ハードウェア構成、ソフトウェア制御、そして外観デザインが高度に連携することで、柔軟な腰のひねりや自然な肩の動きを実現している。肩をすくめる、抱きしめるといった動作はもちろん、うなずく、曲げる、歩くといった基本的な動きまでもが、より自然で滑らかに見えるようになっている。
新世代ロボットは、テクノロジーデーにおいて優雅なキャットウォークを披露した。XPENGの一歩一歩は、機械知能と人間の知恵が完全に協調するという同社のビジョンに、着実に近づいているとしている。
公式動画
XPENGの公式YouTubeで、人間らしさを追求した背景や、どのように設計されたかが詳しく語られている。
「量子コンピュータ」を理解しよう【セミナー情報】
ロボスタでは、インフラ向けAIの最適化と、量子コンピュータ技術でリードする株式会社グリッドの代表取締役社長、曽我部 完氏が登壇するオンラインセミナー「量子コンピュータの進化と最新トレンド」グリッドが語る現状と社会実装までのプロセス」を、2026年2月18日(水)の15:00~16:20に開催します。
セミナーでは、量子コンピュータ業界の2025年総括、2026年に向けたトレンドと最新動向、量子関連の最新技術、日本の研究開発の状況と米中との比較などについて約30分間、曽我部社長にご講演いただきます。
講演の後は、ロボスタ編集長・神崎との対談を予定。量子コンピュータの基礎、量子コンピュータ登場後に懸念される暗号技術の崩壊と対策、量子とレガシーコンピュータの共存など、気になるテーマを深掘り。視聴者からの質疑応答コーナーも設けています。
まだまだ一般に知られていない量子コンピュータの基礎から現在地、最新動向や将来像など、わずか1時間あまりで把握できる貴重な機会です。ぜひふるってご参加ください。
先着50名に無料招待キャンペーンを実施します。お申し込みはお早めに。
セミナーの詳細とお申し込みはこちら。
ヒューマノイドとフィジカルAIがテーマのセミナーを開催
ロボティクス分野のトップランナーであり、ハードウェアとソフトウェアの両面に深い知見を持つ、アールティ代表取締役・中川友紀子さんを講師としてお迎えして、オンラインセミナー「ヒューマノイド×フィジカルAI最前線 アールティに聞くヒューマノイドの社会実装、現実と未来展望」を2026年3月10日(火)に開催します。

講演では、アールティの実績・導入事例、ヒューマノイド/四足歩行ロボットの実装ノウハウ等を紹介して頂きます。また、ロボスタ編集長・神崎との対談では、いま最も注目されている「ヒューマノイド」をテーマに、動画を見ながらの解説を予定しています。Unitree、Tesla、Figure などを例に、実際の映像を交えつつ、ハード/ソフト/プラットフォームの視点から分析し、わかりやすく解説します(※最新情報を重視するため、解説対象のメーカーやロボットは変更となる可能性があります)。
セミナーの詳細とご参加お申込みはこちらです。
【セミナー無料ご招待キャンペーンは満席になりました】
プレミアム会員の残席はあります。3ヶ月無料クーポンをご活用ください。