





2026年6月10日に開催された「ロボスタカンファレンス2026」に、ソラコムのテクノロジー・エバンジェリストの松下氏が登壇、「フィジカルAIはエッジか?クラウドか?知っておきたい基礎と実装アーキテクチャー」をテーマに講演をおこなった。
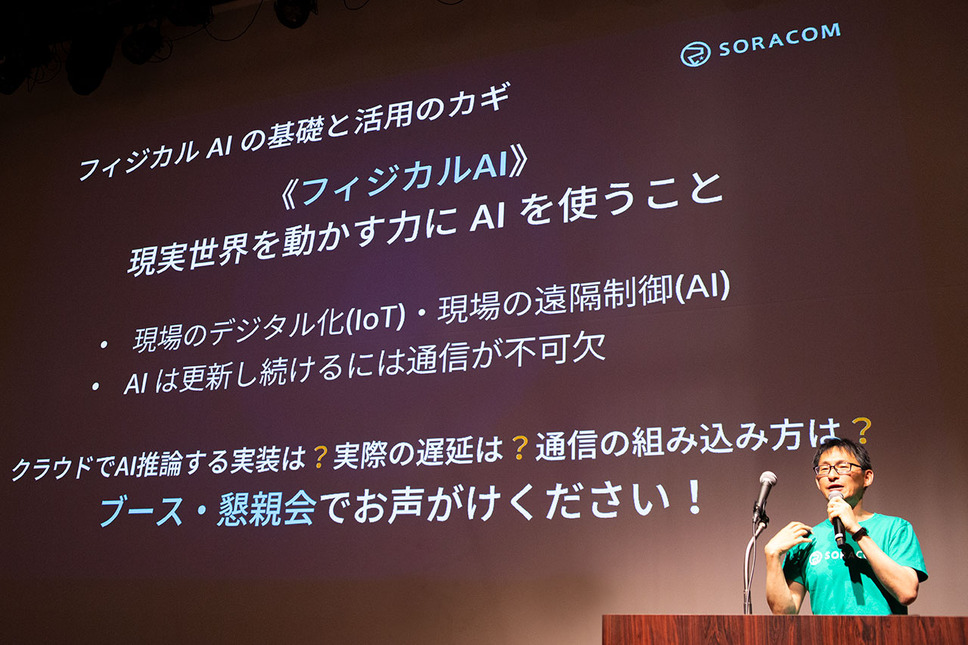
ヒューマノイドや自動運転車への注目が高まる中、フィジカルAIはしばしばロボットの身体能力やAIモデルの性能に注目が集まりがちだ。しかし松下氏は、フィジカルAIの本質は「現実世界を動かす力にAIを使うこと」にあると説明。さらに、エッジAIとクラウドAIの違い、AIの継続的な更新、そしてそれらを支える通信基盤の重要性について解説した。

■フィジカルAIは「人間の行動を再現する仕組み」
講演の冒頭で松下氏は、フィジカルAIを「ロボット」「自動運転」といった目立つ成果物として捉えるだけでは本質を見失うと指摘した。
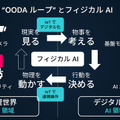
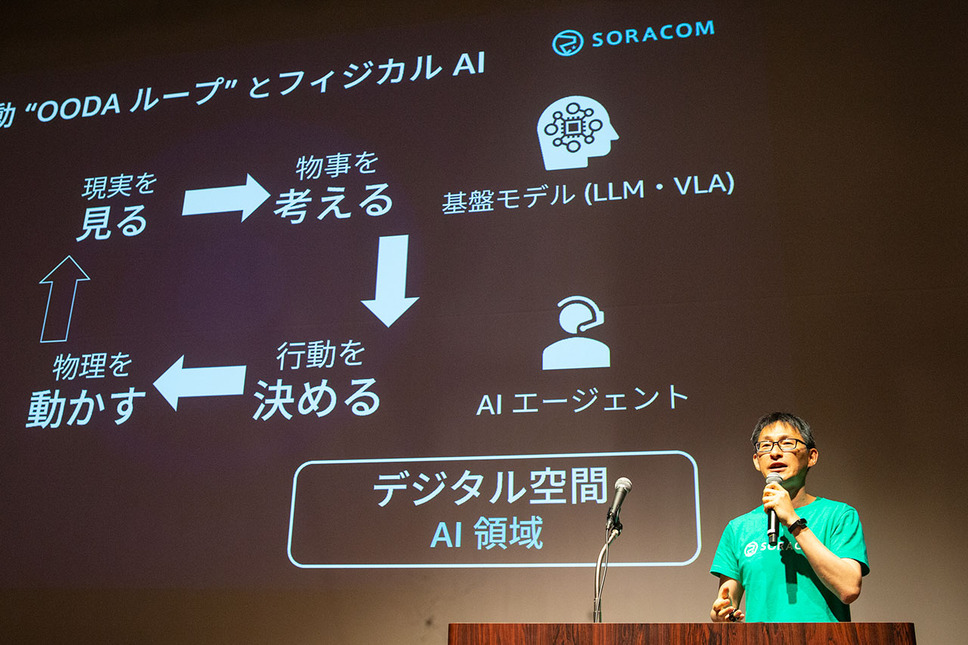
その説明に用いたのが、人間の意思決定プロセスを表す「OODAループ」だ。
「OODA」(ウーダ)は、Observe(観察)、Orient(状況判断)、Decide(意思決定)、Act(行動)の頭文字からなる。人間は現実を見て状況を理解し、何をするか決めて行動するというサイクルを繰り返している。
松下氏は、この流れをフィジカルAIに当てはめながら、センサーやカメラが「現実を見る」、基盤モデル(LLM・VLA)やAIエージェントが「考える」「行動を決める」、ロボットやモビリティが「物理を動かす」役割を担うと説明した。
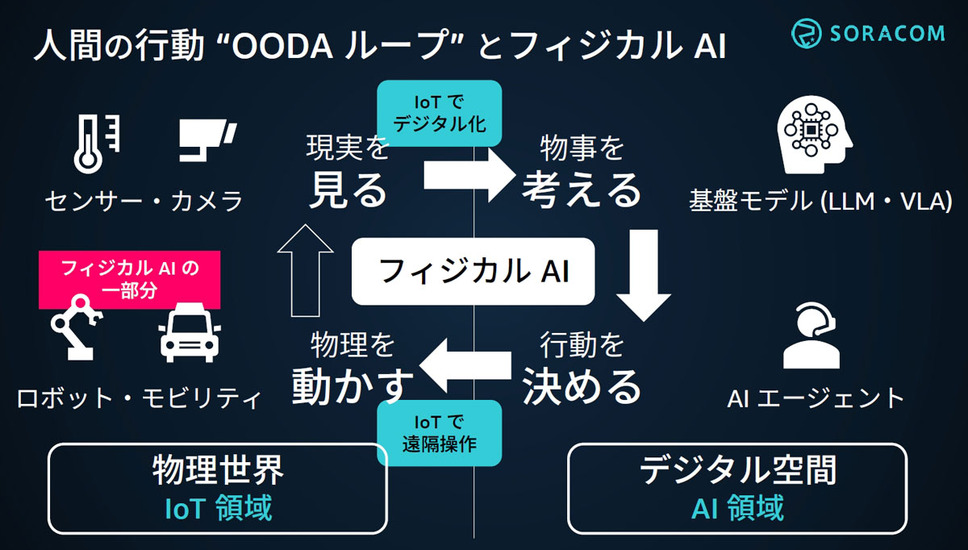
特に印象的だったのは、フィジカルAIをロボット単体ではなく、IoTとAIが統合された仕組みとして整理した点だ。
「ロボットがバク転する」「自動運転車が走る」といった目立つ部分はフィジカルAIの一部に過ぎず、その背後には現実世界をデジタル化するIoTと、意思決定を担うAIの連携が存在していることを示した。
■エッジかクラウドかではなく、重要なのはAIを使い続ける仕組み
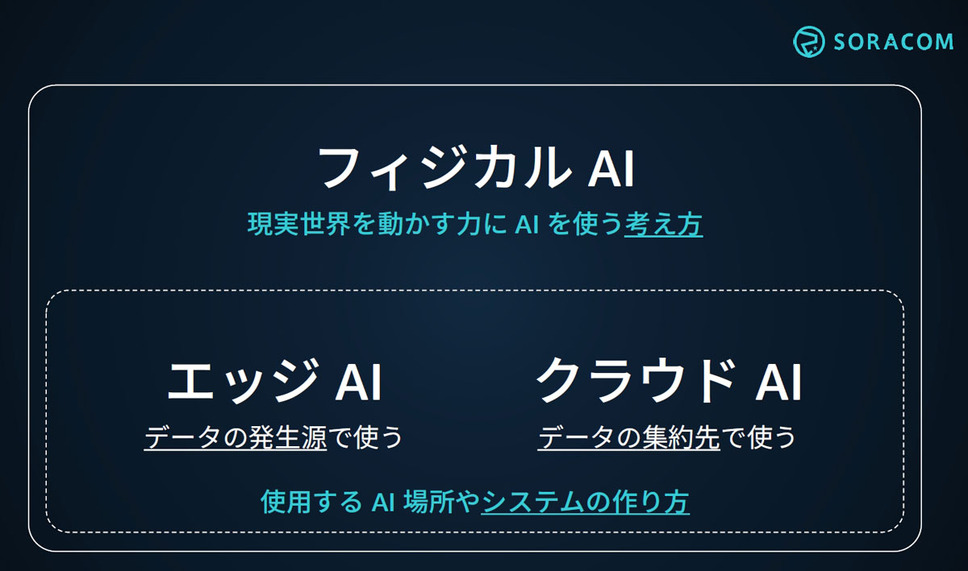
続いて松下氏は、フィジカルAIの実装方法として「エッジAI」と「クラウドAI」を整理した。
「エッジAI」はロボットや自動運転車両など、データ発生源、すなわち現場やその近くでAIを動かす仕組みであり、「クラウドAI」はデータを高性能なクラウドへ送り、そこで推論などに活用する方式だ。
松下氏は、「フィジカルAI=エッジAI」と考えるのではなく、より広い視野で考えるべきだと述べた。
フィジカルAIはあくまで概念であり、エッジかクラウドかは実装方法の違いに過ぎないという考え方だ。
講演では「生成AI」を組み込むアーキテクチャーとして「セルフホスト型」「プラットフォーム型」「API型」の3つを紹介した。
基盤モデルをエッジデバイス上や専用サーバー上で自ら運用する「セルフホスト型」に加えて、ハイパースケーラーと呼ばれるクラウド事業者上のAI環境を利用する「プラットフォーム型」、そして OpenAIやAnthropicといったAI事業者のAPIを利用する「API型」を選択肢として示した。
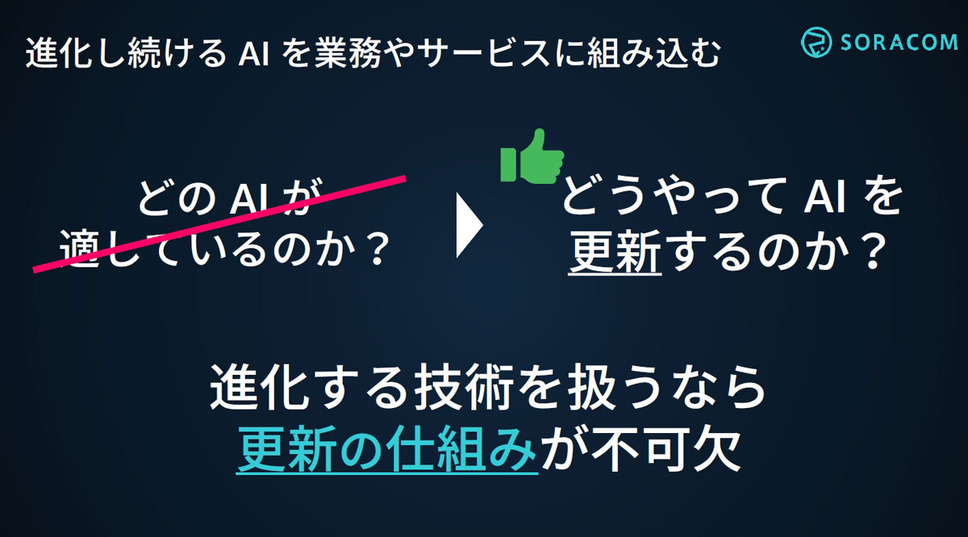
その上で松下氏は、「どのAIが良いか」という検討も大切だが、「どうやって良いAIを使い続けるか」が重要だと強調した。
生成AIは日々性能や機能が進化している。現在の最適解が将来も最適である保証はない。そのため、仮にエッジデバイス上で閉じるフィジカルAI実装でも、AIモデルを継続的に更新できるアーキテクチャーを前提に設計すべきだと語った。
■フィジカルAI時代に不可欠となる通信基盤
講演後半では、フィジカルAIにおける通信の役割に焦点を当てた。
松下氏は、クラウドAIを利用する場合はもちろん、エッジAIであってもAIモデルの更新や遠隔管理のために通信が不可欠だ。すなわち、エッジかクラウドかに関わらず、フィジカルAIを実運用するには通信基盤が必要になる。
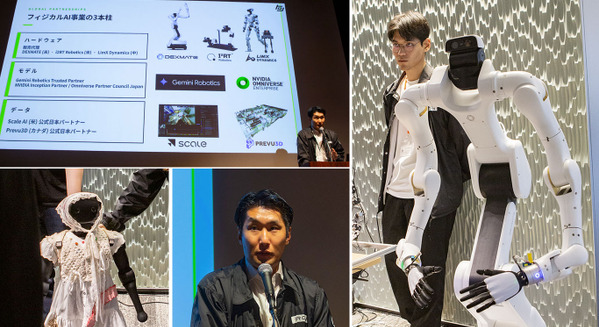
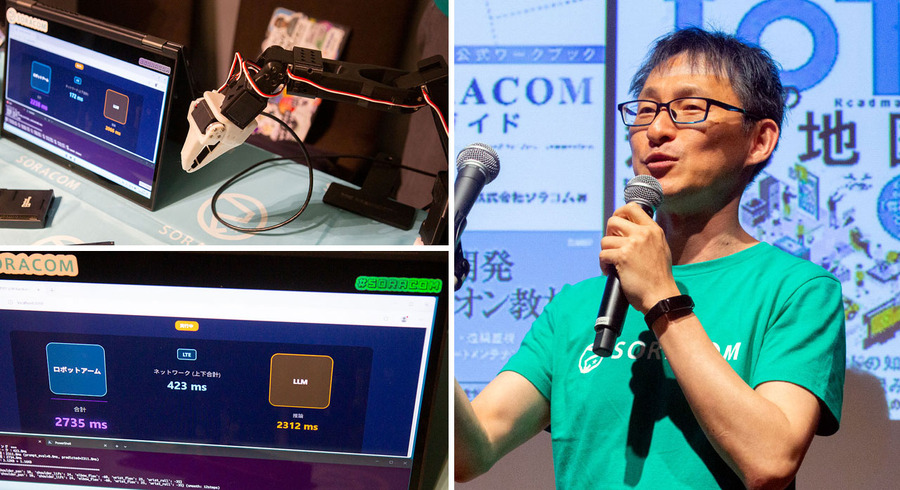
講演では、ロボットアームをクラウド上の大規模言語モデル(LLM)と接続し、LTE経由で推論結果を受け取るデモも紹介された。
また、会場のソラコムブースでは、ロボットアームとクラウド上のLLMをLTE通信で接続したデモを公開。AWS上で稼働するQwen3が推論を行い、その結果をロボットへ返して動作させる構成だ。
ここでは、クラウドでの推論をモバイル通信で利用しても大きな遅延が発生しないことを紹介した。

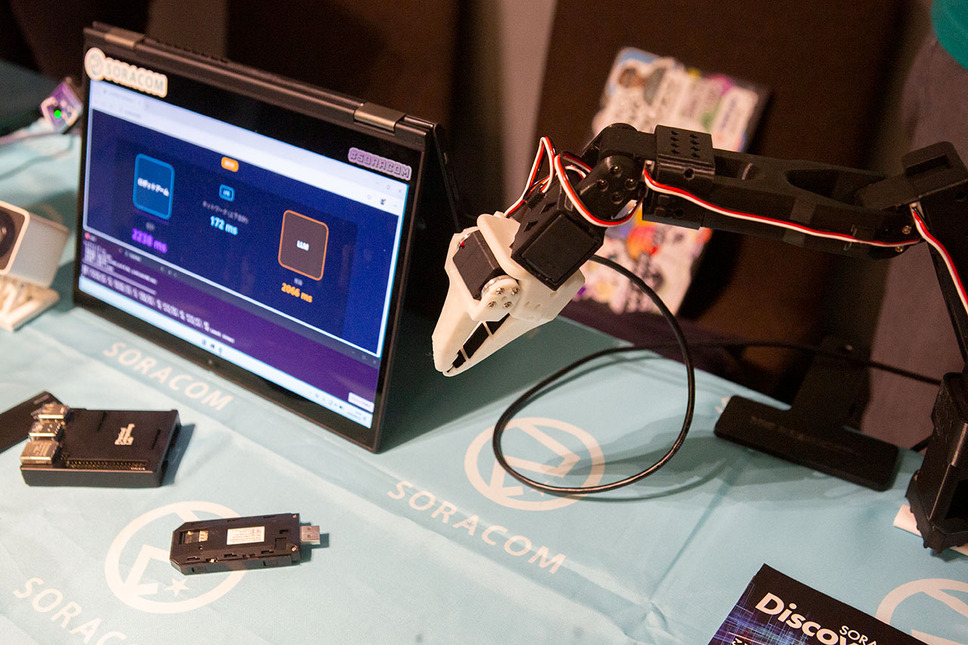
デモ画面には処理時間の内訳も表示されており、実測では総処理時間約2.7秒のうち、LTE通信は約0.4秒、LLM推論に要した時間は約2.3秒だった。松下氏は「通信にかかる時間よりもLLMの推論時間の方が長く、この時は敢えて米国サーバーを利用しているが、日本などの近いサーバーを利用すれば、通信遅延はより小さくできる」と説明し、クラウドAIを利用しても十分実用的な応答速度が得られることをアピールした。

さらに会場では、JetsonなどのLinux搭載機器へLTE通信を組み込む手法も紹介。Wi-Fi環境に依存せず、遠隔監視やソフトウェア更新を行える点も、フィジカルAIの社会実装を支える重要な要素としてモバイル通信の有効性が紹介された。
■リアルワールドAIプラットフォーム構想
更に同社は、センサーやカメラなど現場のデータ(フィジカル)と、社内外のデータ(デジタル)、そしてAIを通信でつなぐ「リアルワールドAIプラットフォーム」の構想を紹介した。
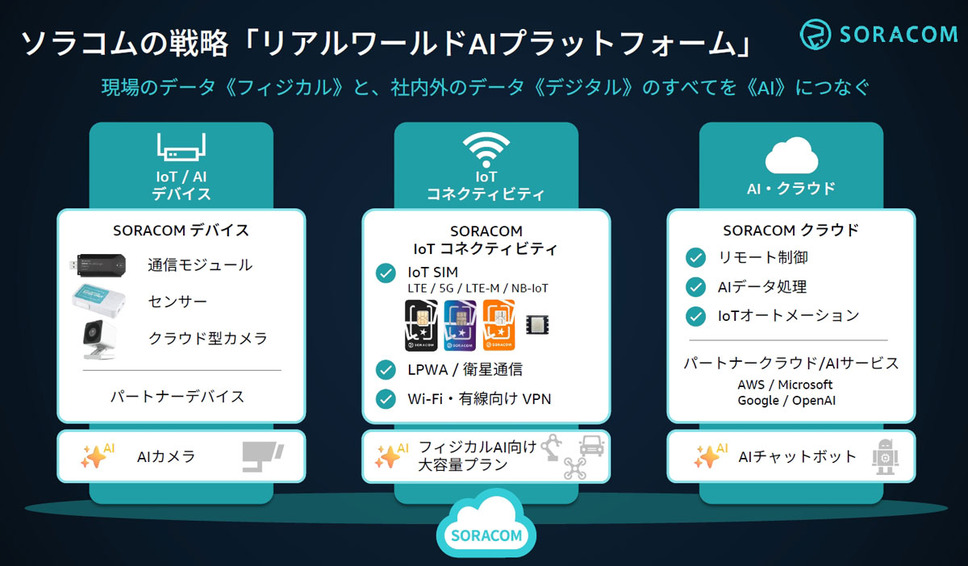
そして松下氏は、フィジカルAIに求められる通信要件として「大容量通信」「マルチキャリア対応」「セキュリティ」「管理」の4つを挙げた。
ヒューマノイドや自動運転車への注目が集まる一方で、それらを実運用するためには安定した通信環境が欠かせない。
今回の講演は、フィジカルAIの競争がAIモデルやロボットハードウェアだけではなく、それらを支える通信・IoT基盤へと広がっていることを示す内容だった。

■「フィジカルAI」をAI、ロボット、通信インフラの高度化として捉える
フィジカルAIの議論では、ヒューマノイドの身体能力や生成AIの性能が注目されがちだ。しかし実際の社会実装を考えたとき、AIを継続的に更新し、安全かつ安定して運用する仕組みも同じくらい重要になる。
ソラコムの講演は、フィジカルAIを「ロボットの進化」だけではなく、「IoT、AI、通信が統合されたシステム」として捉える視点を示した。ヒューマノイドやフィジカルAIの進化が注目される一方で、その進化を現場へ届け続ける仕組みづくりもまた、フィジカルAI時代の重要な検討領域になっている。