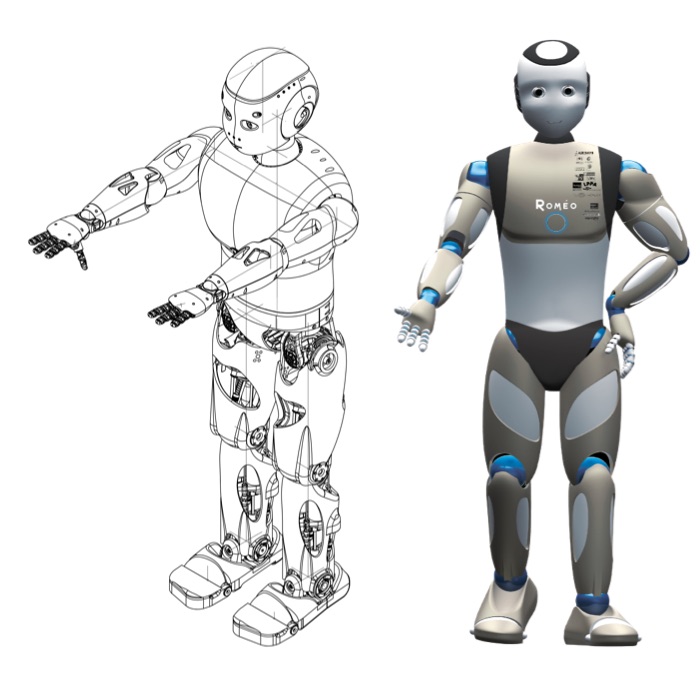
ソフトバンク・ロボティクス社とともにpepperの開発を行う、フランスのAldebaran Robotics(アルデバラン・ロボティクス)社が現在取り組んでいる「Romeo Prpject(ロミオ/ロメオ プロジェクト)」について調べてみました。
前編、中編はこちらになりますので、まだの方は先に前編、中編をごらんください。
現在も進行中のRomeoプロジェクトには課題が3つあります。

1つ目はメカトロニクス的な課題。
人間の生活環境で使用するために、人間型を保ちながら危険でないを、どうやって両立するか。大きさが人間型に近づくほど重量も重たくなり、何かの拍子でロボットが転倒した時に事故が起こる可能性も高くなります。こちらは、現在40キロある重量を30キロにするという目標で進めているそうです。
2つ目は、人間の生活環境の中でいかにスムーズに動き回れるようにするか。
動きをスムーズに行うだけであれば車輪型にすれば解決しますが、そうなると車輪型ロボットを導入するために家屋を再設計する必要が生じてきます。
Romeoのような二足歩行での人間型ロボットでは今の家屋のままロボットを導入できますが、そもそも二足歩行はバランスをとるのが難しい問題があります。こちらは、新しいロボット歩行アルゴリズムを開発することで課題の解決を目指しています。
3つ目は、人間がロボットに指示をする際、どれだけ直感的に行えるようにするか。
Nao や Pepper では、人間がロボットに話しかけることによって、音声でロボットに指示が出せます。Romeoでは音声入力だけでなく、人間が手の動きをすることでロボットに指示を出せる技術を開発中です。
例えば、指をさして「あれを取ってきて」や、手を使って「こっちへ来い/ストップ」といったものです。更には、目の前の人間の感情を読み取り、ロボットが振る舞いを調整する機能も実装される予定です。

Romeoプロジェクトの今後ですが、2014年9月時点で完成した7体のプロトタイプのうち4台が欧州内のラボに送られ、2年間の予定で様々なテストが行われています。
ラボでは歩行能力、ナビゲーション、人間とのコミュニケーション能力などについてテストが行われ、結果は今後の人間型ロボット進歩のため、研究機関などと共有されます。
2016年には、実際の高齢者ケア要員として試験的に導入予定ですが、研究のためのロボットのため大量生産は想定しておらず、一般発売は今のところ予定されていません。
Romeo は人間型ロボットを大きく進歩させるためにつくられたロボットで、今後数年間の研究結果が、これからのロボット開発に生かされていきます。
プロジェクト Romeo の結果によって、パートナーのして人間型ロボットが家庭にやってくる日は、そう遠くないかもしれませんね。
ABOUT THE AUTHOR /
北構 武憲PR


このカテゴリの新着記事




注目のロボット









注目のロボット企業







連載・コラム

