








ピッコロボIoTに挑戦!
ロボットエバンジェリストの西田です。わーわー
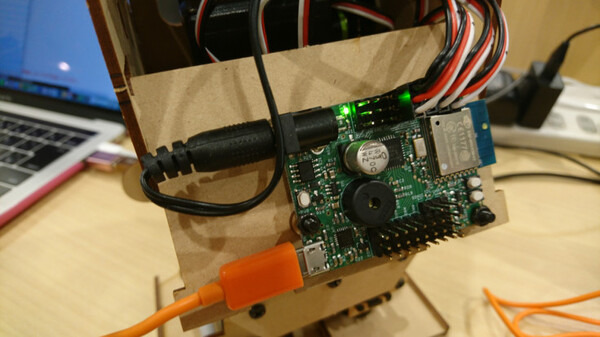
1月31日発売の、「ピッコロボIoT」のデモ機を編集部で入手したので、さっそく動かしてみました! これは、ヴイストン株式会社が開発した、Arduino互換のワイヤレスロボット制御ボード「VS-RC202」と、入門用二足歩行ロボット「ピッコロボ IoT」がセットになっている組み立て式のキットです。初心者学習用Arduino互換ボード搭載2足歩行ロボット「ピッコロボ」の後継機となっています。
西田めも
残念ながら、今回は既に完成している機体をお借りしたので、組み立てはできませんでした。作ってみたかったなー。
※デモ機のため、若干製品版と違うかもしれません。
早速動かしてみよう!
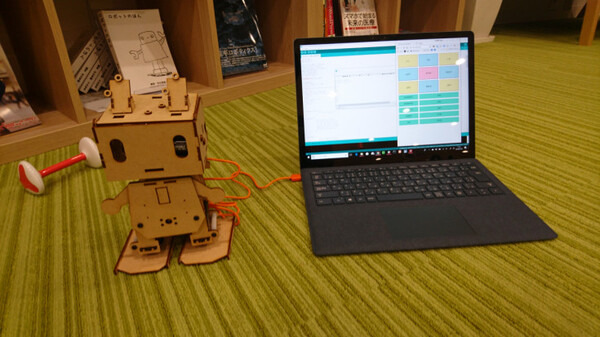
実行には、Windows機が必要です。Arudinoの開発環境やドライバをインストールする必要があります。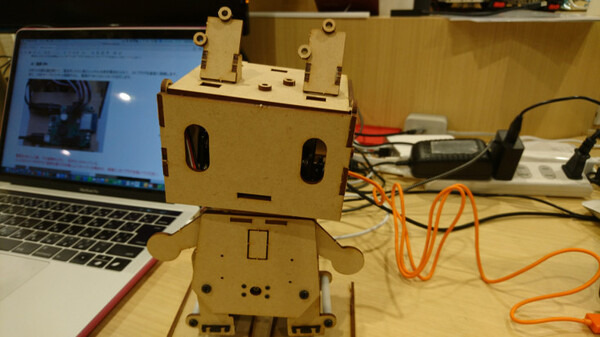
今回は使いませんでしたが、たくさんのセンサーがデモ機と一緒に送られてきました。まとめて紹介します。(2/8 追記:このセンサーは、「ピッコロボIoT自律制御セット」を購入するとついてくるもので、通常のセットにはついてないそうです。)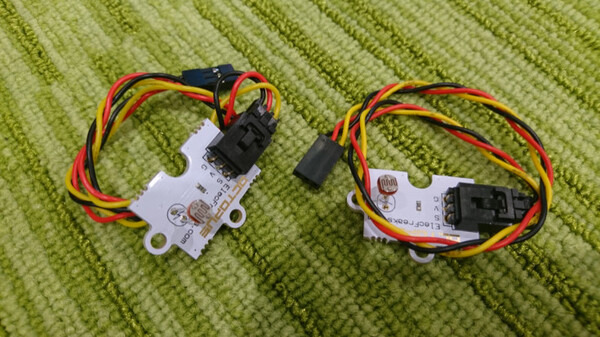



これらのセンサーを使うと、ラジコンみたいにコントロールするのではなく、センサーの値にあわせて自発的に動かしたり出来るみたいです。たのしいですね!
今回は、初期の状態(センサーを付けてない状態)で、動かしてみました! ピッコロボにプログラムを転送したあとに、ピッコロボの中にあるコントローラーのhtmlをパソコンで表示して動かしています!
どうでしょうか! 結構歩くスピード早いですね!
こうおもった
よく考えたら、ピッコロボのwifiの設定をしているので、USBケーブルを抜いても動作できたのかもしれないです・・・。簡単な作りに見えて、きちんと歩くのでスゴイと思いました! センサーとか工夫したらたのしいと思います!
