東京科学大学大岡山キャンパスで2025年9月2日(火)から5日(金)まで開催される「第43回日本ロボット学会学術講演会」において、オムロン株式会社は、ラボオートメーションに関する技術論文7件を発表する。
※同社の発表は3日(水)~5日(金)
ラボオートメーション技術で研究現場の革新を目指す
ラボオートメーションとは、創薬をはじめとするラボでの研究のうち、実験の準備や片付け、試薬・実験機器・設備の操作、データ収集など、これまで自動化が難しかった一連の非定型な作業を次世代ロボットで自動化し、研究員がより創造的な活動に時間を費やせるようにすることを指している。
今回発表する技術論文は、国内最大級の学術会議である「日本ロボット学会」において、以下の要素技術に関する研究成果7件を披露する。
主要な発表技術
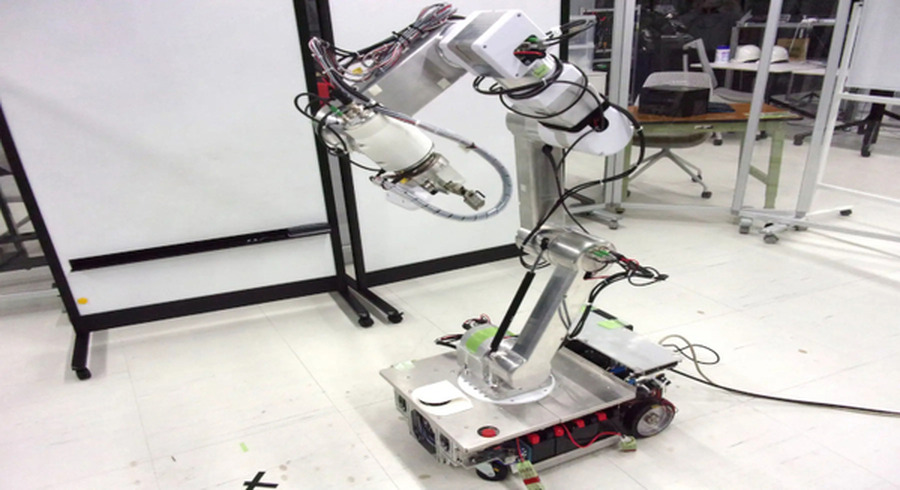
モバイルマニピュレータの移動技術
「モバイルマニピュレータ」が研究室のような狭い通路でも自由に移動可能になる技術として、「低次元線形化モデルと速度分解による移動マニピュレータの低計算量全身協調制御」を発表予定だ。この技術により、比較的フットプリントの小さい差動二輪駆動移動マニピュレータを機敏に移動させることが可能となる。
ワークベンチロボットの精密作業技術
「ワークベンチロボット」が位置誤差に柔軟に対応し、安定した作業を行える技術として、「SSCFlowを用いたマーカレスビジュアルサーボによる透明物体の位置合わせ」などを紹介する。この技術により、1.5mm以内の位置合わせ精度を実現した。
透明ラボウェア認識技術
フラスコ等の透明なラボウェアを認識できる技術として、「SSCFlow: オプティカルフローの整合性と形状拘束を統合したステレオベース物体位置姿勢推定手法」を発表予定である。この技術は、ステレオ整合、透明体対応、60ms以内の推論速度を同時に満たした初の手法となっている。
その他の発表技術
ラボオートメーション技術に加えて、ロボットの柔軟な関節動作に関する技術論文も発表する。「逆運動学とNURBSを用いた運動の時間微分可能性保証」や「コニカルクランク機構による二脚ロボットの膝に適した小型関節」などの研究成果を披露予定だ。