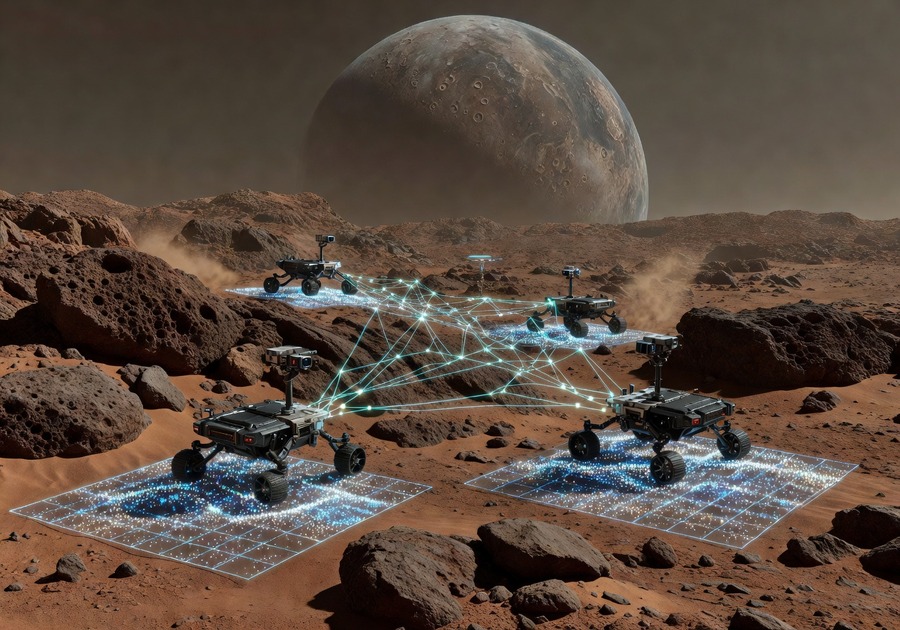



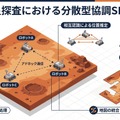

月や火星の探査では、地球のようなGPSや通信インフラが使えない。この課題を解決するため、複数のロボットが協力して地図を作り、自分の位置を推定する「分散型協調SLAM(C-SLAM)」技術が注目されている。しかし、惑星環境では通信が途切れたり帯域が限られたりするため、理想的な条件での実験結果がそのまま使えるとは限らない。
モントリオール工科大学のPierre-Yves Lajoie氏、Giovanni Beltrame氏らの研究チームは、火星を模した地形で3台のロボットを動かし、アドホックネットワーク越しにC-SLAMを実行する実証実験を行った。本論文では、通信制約が協調性能に与える影響を詳しく分析するとともに、ロボット間のスループットと遅延をリアルタイムで記録した新しいデータセットを公開している。
C-SLAMとは
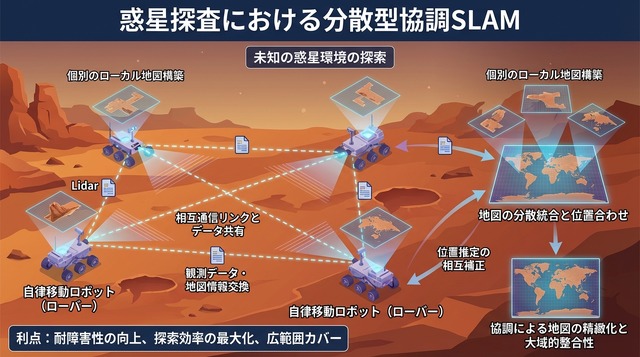
SLAM(Simultaneous Localization and Mapping)は、ロボットが未知の環境で自己位置を推定しながら同時に周囲の地図を作成する技術である。単体ロボットのSLAMでは、1台のセンサ情報だけに頼るため観測範囲が限られ、誤差が蓄積しやすくなる。一方、C-SLAMでは複数のロボットが互いに観測データを共有し、地図を協調的に構築する。
この協調により、各ロボットが異なる視点から同じ場所を観測できるため、自己位置推定の精度が向上する。また、1台が通信圏外に出ても他のロボットが補完できるため、ミッション全体の頑健性が高まる。惑星探査では人間が遠隔操作できる範囲が限られるため、ロボット同士が自律的に協調する仕組みが不可欠である。
さらに、分散型C-SLAMは中央サーバーに依存しない設計が特徴である。各ロボットが対等な立場で情報を交換し、自分の地図を更新する。これにより、通信インフラが整っていない惑星環境でも動作可能になる。

惑星環境の難所
月や火星の地形は、自己位置推定にとって非常に厳しい条件を備えている。まず、岩石や砂地が広がる単調な景観では、視覚SLAMが頼りにする特徴点(エッジやコーナー)が乏しくなる。特徴点が少ないと、ロボットは自分がどれだけ移動したかを正確に把握できない。
また、クレーターや砂丘のように似た形状が繰り返し現れる地形では、ロボットが「今見ている場所」と「以前見た場所」を誤認識するリスクが高まる。このような誤対応は、地図全体の整合性を崩す原因になる。さらに、砂塵が舞い上がったり、太陽光の角度が極端に変化したりすると、カメラやLiDARの観測品質が低下する。
本研究では、こうした惑星環境特有の困難さを再現するため、火星模擬地形(planetary analogue terrain)を実験場所に選んだ。岩石が散在し、起伏のある地形でロボットを走行させることで、実際のミッションに近い条件下での性能を検証している。
実験の概要
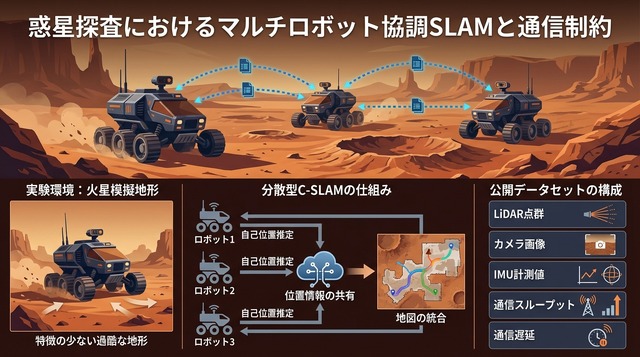
研究チームは、火星模擬地形において3台の移動ロボットを用いた実証実験を実施した。各ロボットには、視覚カメラやLiDARなどのセンサが搭載されており、周囲の環境を観測しながら自己位置を推定する。ロボット同士はアドホックネットワークを介してピア・ツー・ピアで通信し、観測データや地図情報を交換する。
アドホックネットワークとは、基地局や中継局を必要とせず、ロボット間で直接無線通信を行う方式である。惑星探査では通信インフラが存在しないため、この方式が現実的な選択肢となる。ただし、ロボット間の距離が離れると通信品質が低下し、データの送受信が途切れることがある。
実験では、各ロボットがリアルタイムでスループット(単位時間あたりに送受信できるデータ量)と遅延(データが届くまでの時間)を計測した。これにより、通信環境の変化がC-SLAMの動作にどう影響するかを定量的に評価できるようになっている。
分散協調の設計
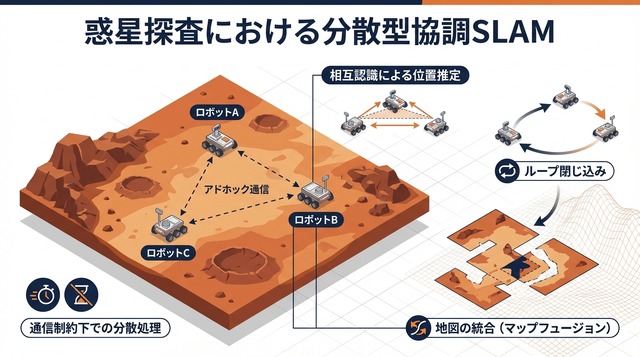
分散型C-SLAMでは、各ロボットが自律的に動作しながら、必要に応じて他のロボットと情報を共有する。まず重要なのが、ロボット間の相互認識である。あるロボットが別のロボットを視野に捉えると、互いの相対位置を推定し、それぞれが持つ地図を統合するための手がかりを得る。
次に、ループ閉じ込み(loop closure)が鍵となる。これは、ロボットが以前訪れた場所に戻ったことを検知し、蓄積した誤差を修正する処理である。分散環境では、別のロボットが観測した場所を自分も観測することで、ループ閉じ込みの機会が増える。これにより、地図全体の整合性が向上する。
地図の整合化(map fusion)も重要な要素である。各ロボットが独自に構築した地図を統合する際、座標系のずれや重複領域の扱いを適切に処理する必要がある。本研究では、分散最適化アルゴリズムを用いて、中央サーバーなしで地図を一致させる手法を採用している。
通信制約の影響
論文の主要な知見の一つは、通信制約がC-SLAM性能に与える影響の詳細な分析である。帯域が制限されると、ロボットが共有できる情報量が減少する。例えば、高解像度の画像データや詳細な点群データを送信できず、簡略化した特徴量だけを交換せざるを得なくなる。
遅延が増大すると、他のロボットから受け取る情報が古くなり、リアルタイム性が損なわれる。特に、ロボットが高速で移動している場合、遅延した情報を使って地図を更新すると、位置推定の誤差が拡大する可能性がある。さらに、通信が完全に途絶えると、そのロボットは孤立し、他のロボットと地図を同期できなくなる。
実験では、スループットが低下するにつれて地図の更新頻度が減り、全体の地図整合性が悪化することが確認された。また、断続的な通信では、ロボットが再接続したときに大量のデータを一度に送受信する必要があり、ネットワークに負荷がかかることも明らかになった。
新データセット
本研究では、実験中に収集されたデータをオープンデータセットとして公開している。このデータセットには、各ロボットのセンサデータ(カメラ画像、LiDAR点群、IMU計測値)に加えて、ロボット間のリアルタイムなスループットと遅延の測定値が含まれている。これは、通信制約を考慮したC-SLAM研究において貴重なベンチマークとなる。
従来のSLAMデータセットの多くは、通信環境が理想的であることを前提としており、実際の惑星探査で直面する制約を反映していなかった。本データセットは、ピア・ツー・ピア通信の変動をリアルに記録している点で独自性がある。研究者はこのデータを使って、通信品質の変化に適応するアルゴリズムを開発・評価できる。
また、データセットには火星模擬地形特有の視覚的特徴も含まれている。特徴点が乏しい場面や、似た景観が繰り返し現れる場面が記録されており、惑星環境でのSLAMアルゴリズムの頑健性を試すのに適している。
今後の展望
本研究から得られた教訓は、今後のマルチロボット探査ミッションの設計に重要な示唆を与える。まず、通信とSLAMを個別に最適化するのではなく、両者を統合的に扱う必要がある。例えば、通信帯域が限られている場合、どの情報を優先的に共有すべきかを動的に判断する仕組みが求められる。
情報共有の優先順位付けも研究課題である。すべてのセンサデータを送信するのではなく、地図の整合性に最も寄与する情報(ループ閉じ込みに関連する観測など)を選択的に送信することで、限られた帯域を有効活用できる。また、通信が途絶えた場合に備えて、各ロボットが独立して動作できる能力も重要である。
惑星探査ミッション全体の観点では、ロボットの配置戦略や通信範囲の設計が鍵となる。ロボット同士が常に通信圏内にいるよう協調して移動するか、あるいは一時的な孤立を許容しつつ広範囲を探査するか、ミッション目標に応じた選択が必要である。本研究のデータセットと知見は、こうした設計判断を支える基礎資料として活用されることが期待される。