リーガルテック株式会社は、建設現場向け資材搬送ロボットの作業計画最適化技術に関する特許検討において、同社が提供する特許支援AIプラットフォーム「MyTokkyo.Ai」が活用されたことを発表した。
本事例では、建設現場で稼働する搬送ロボットが工程変更のたびに作業計画の再設定を要していた課題に対し、工程進捗に応じて搬送計画を最適化する技術について、特許化可能な発明要素の抽出および発明提案書の整理が行われた。
導入の背景と課題
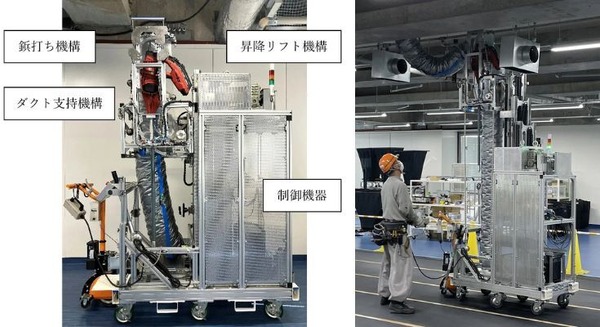
建設現場では、工程の進捗状況や作業順序の変更、資材配置の見直しが日常的に発生する。資材搬送ロボットを導入していても、工程変更のたびに人手による再設定や計画修正が必要となり、ロボットの待機時間増加や現場全体の非効率化が問題視されている。
当該建設関連企業では、工程の変動を前提とした柔軟な搬送計画を自動で立案できる仕組みの必要性を認識していた。しかし、その制御構想をどのように発明として整理し、既存の施工支援技術との差分を明確化するかが知財面での検討課題となっていた。
MyTokkyo.Aiの採用と活用効果
研究開発段階の構想を効率的に特許検討へ落とし込む手段として、特許実務に特化したAIエージェントを備えるMyTokkyo.Aiが採用された。同プラットフォームは、工程表・作業フロー・資材配置に関する説明資料などを入力することで、AIが内容を解析し、課題・解決手段・技術的効果の観点から発明要素を自動的に整理できる。また、建設ロボットや施工管理分野の先行技術を参照しながら検討を進められる点も評価された。
MyTokkyo.Aiを活用結果
課題:工程進捗や作業順序の変更が頻発する建設現場において、資材搬送ロボットの作業計画を柔軟に変更することが困難である点が挙げられた。
解決手段:工程表・現場の進捗状況・資材配置情報をAIが統合的に解析し、日次単位で最適な資材搬送計画を自動生成する作業計画最適化方式が提示された。
技術的効果:搬送ロボットの待機時間や無駄な移動を削減し、現場全体の作業効率向上に寄与する点が明確になった。
これらの内容を発明提案書として整理することで、建設現場特有の変動要因を踏まえた制御構想を、特許出願を見据えた技術表現として具体化できた。
今後の展望
建設分野では、人手不足や工程の高度化を背景に、ロボットによる施工支援や資材搬送の重要性が高まっている。リーガルテックは今後も、建設・物流・医療・災害対応など多様な現場領域において、企業の研究開発活動を知財面から支援する特許AIエージェントとして、発明創出と知財戦略の高度化に貢献していく方針だ。