Tokyo Roboticsは、2026年4月2日(木)に自社開発のヒューマノイドロボット「Torobo Humanoid」を用いた最新の技術デモンストレーション動画を公開した。
今回の動画では、人間のような自然な歩行や全身の遠隔操作、モーショントラッキングといった高度な制御技術が披露されている。
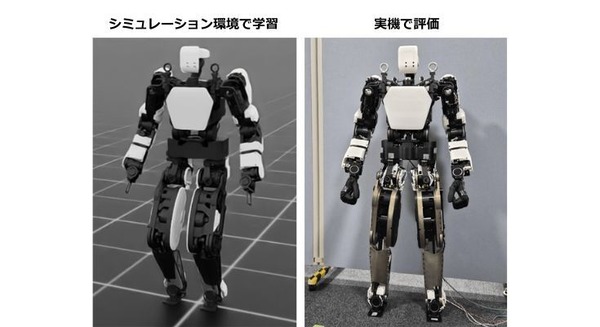
強化学習によるダイナミックかつ安定した全身運動の実現 同社が公開した技術の核心は、大規模並列強化学習(RL)を用いた制御ポリシーの訓練にある。
物理シミュレータ上で学習された堅牢なポリシーを実機である「Torobo Humanoid Prototype B」に適用することで、現実の環境下においてダイナミックかつ安定した全身運動を可能にした。
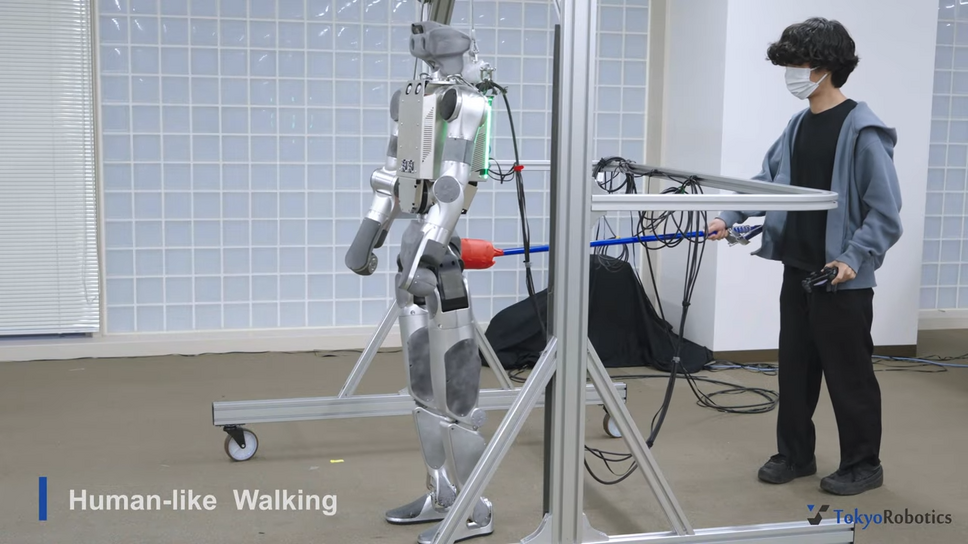
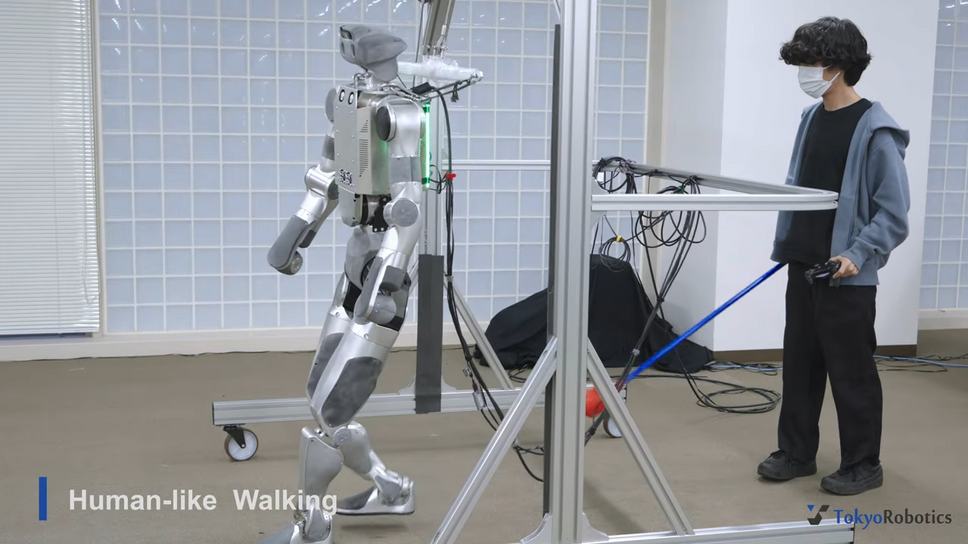
人間のような歩きと体勢
動画内では、人間のように膝を伸ばしたスムーズな歩行動作が紹介されている。
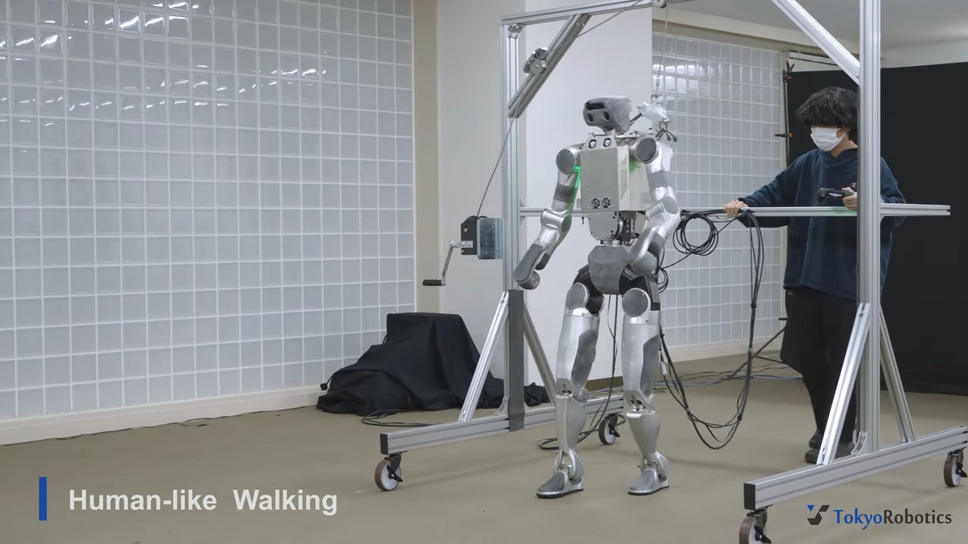
さらに、外部から棒で突くなどの物理的な干渉を加えるテストも行われた。このような負荷に対しても、ロボットは即座に姿勢を立て直す安定性を見せている。


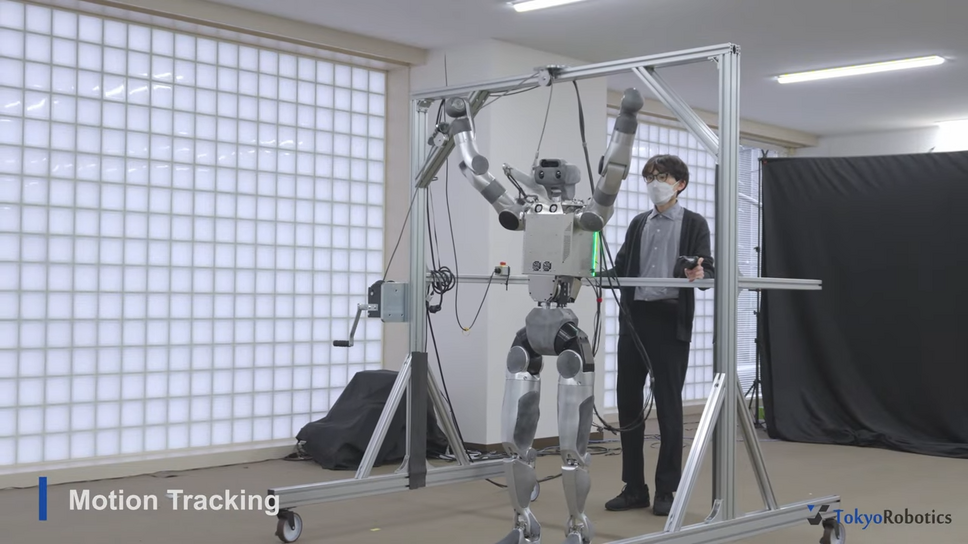
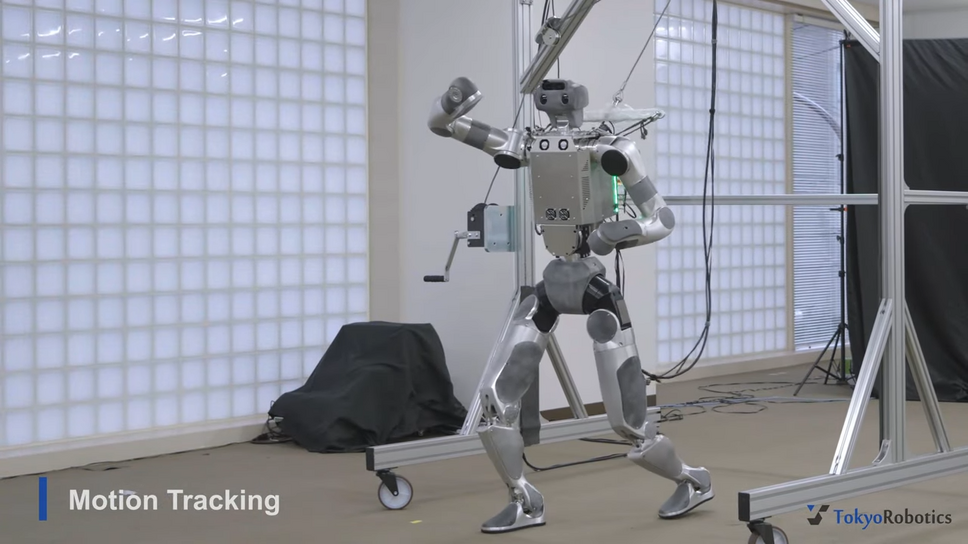
全身遠隔操作・モーショントラッキング
同社は「Whole-body Teleoperation(全身遠隔操作)」と「Motion Tracking(モーショントラッキング)」のデモンストレーションも実施した。
遠隔操作の場面では、オペレーターがVRゴーグルとコントローラーを装着し、自身の身体の動きをロボットに伝達する様子が確認できる。ロボットはオペレーターの腕の振りや歩行動作をリアルタイムで再現し、人間と同期したような動きを実現している。


また、モーショントラッキング技術によって、より複雑な動作への対応も可能となった。動画では、ロボットが力強く腕を振り上げたり、構えをとったりする様子が映し出されており、人間の動きを高い精度で追従していることが示された。
今後の展望
自律タスク実行に向けた今後の展望 Tokyo Roboticsは今後、ハードウェアとソフトウェアの両面からさらなる運動安定性の向上を図るとともに、自律的なタスク実行を実現するためのAI実装を進めていくと方針を示している。
動きの詳細は同社の公式YouTubeから確認できる。