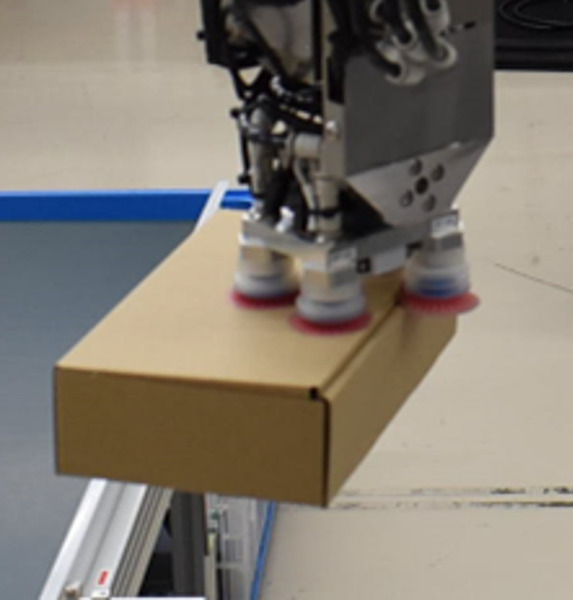
世界初のフィジカルAI・ロボット訓練センター「Neura Gym」を開発 ヒューマノイド開発で仮想空間と現実の橋わたしの施設に 2025.10.17 Fri 11:45 ドイツ発のロボティクス企業、Neura Roboticsは、物理空間にお…
プレミアム会員限定【見逃し配信】ヒューマノイドは産業を変えるか トロンが語る「デジタルツイン×フィジカルAIが導くロボット実装の未来」 2026.6.22 Mon 11:25 製造業向けに先端技術の橋渡しを行うトロンの和嶋CEOを迎え、フ…
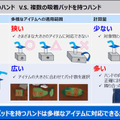
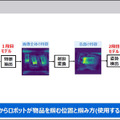
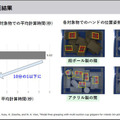
日本製AMR「Neibo」がロボットテクノロジージャパン2026に初出展 エクセディの最新技術 2026.6.4 Thu 19:30 株式会社エクセディは、2026年6月11日(木)から13日(土)まで…
 世界初のフィジカルAI・ロボット訓練センター「Neura Gym」を開発 ヒューマノイド開発で仮想空間と現実の橋わたしの施設に
世界初のフィジカルAI・ロボット訓練センター「Neura Gym」を開発 ヒューマノイド開発で仮想空間と現実の橋わたしの施設に