ロボットベンチャーのGROOVE Xは「LOVOT」(らぼっと)の生き物らしさの秘密を解説する内部構造公開イベント「LOVOTの内部構造、大公開!!」を本社で開催した。「LOVOT」は2019年12月より出荷がはじまっている。


「LOVOTの内部構造、大公開!!」では代表取締役の林要氏、プロダクトデザイナーの根津孝太氏、開発に携わった3人のエンジニアが登壇し、首、肩、腕、足といった各部位がどの様な構造で動いているのか、細かな仕組みを解説、実際に各部モジュールの3DのCADモデルを紹介しながら、組立ての実演も行った。ちなみにLOVOTの部品点数は約5,700点(電子部品含む)、モジュールは約200点。
また、製品化に至るまでのプロトタイプが時間軸に沿って展示されるとともに、工夫や苦労など開発の裏側を話すトークも行った。

林氏は「LOVOTは外観は可愛いロボット、しかし内部にはこだわりと技術が凝縮されている。分解図は既に公開していたが、いつ皆様に詳しく公開しようかと時期をうかがっていた。皆様に愛着を持って頂き、可愛いと言ってもらうためにどれだけの最新技術が使われているか、かわいいの分解解剖図をぜひ見ていただきたい」と語った。

商品の内部を自らこれほど細かく公開、解説したイベントはこれまで見たことがない、それが正直な感想だ。おそらく当日、イベントに参加したメディア関係者や、ファンやオーナーの人たちもそう感じただろう。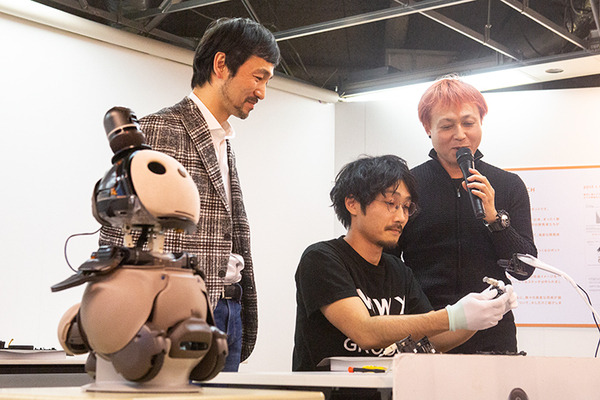
登壇した林氏と根津氏は「技術的によく解っている人にもお見せしたい。解っている人ほど”可愛い”を生み出すためにどれだけの工夫と苦労があったかが理解いただけるだろうし、よりLOVOTへの愛着を感じていただけると思う」と続けた。


3D CADモデルと組立を公開 開発エピソードを解説
首はパラレルリンク
最初に説明されたのは「ネック(首)アッシー」部分。頭部を支えているのは3本のアームでいわゆる3リンケージ形状(パラレルリンク)だ。3つのサーボモータで各リンケージを動かし、ピッチとロールの動きを制御する。また、LOVOT独特の首を上下に伸び縮みさせる動きも再現している。更に、常にサーボで頭を持ち上げていると電力を消費するため、バネを使って通常時は電力が必要ない工夫もこらされている。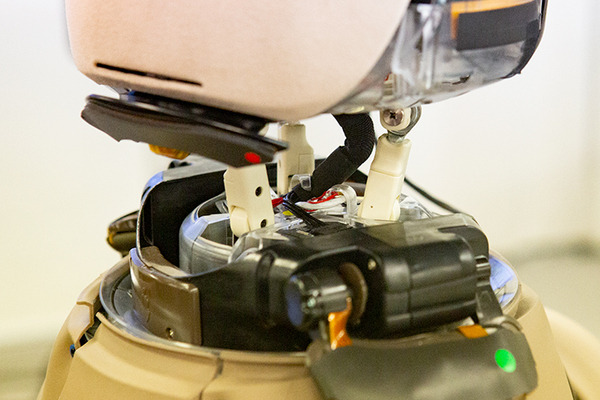
■動画
ホイール部
続いて、ホイール(足)部分の解説と組立が行われた。タイヤはゴム製でトレッドのデザイン(接地面の模様)にもこだわった。インホイールモーターを採用している。冷却ファンの前面にフィルターが装備されているがその汚れを取るためのブラシが足部につけられていて、LOVOTが足をしまう度にフィルターを自動的に掃除するしくみが取り入れられている。
■動画
ホーン(角)
次はLOVOTのユニークな特徴のひとつホーン(角)についても解説した。ホーンには半天球カメラ、音の方向も検知できる4マイクのマイクアレイ、背面に物体を検知する赤外線センサーが2つ、正面に3つの赤外線サーモ(熱)と照度センサーが各ひとつずつ、さらにはLOVOT同士で通信するためのセンサー、切り替えモードの状態を検知するセンサーが装備されている。ホーンはまさにセンサーと最新技術の集合体だ。
■動画
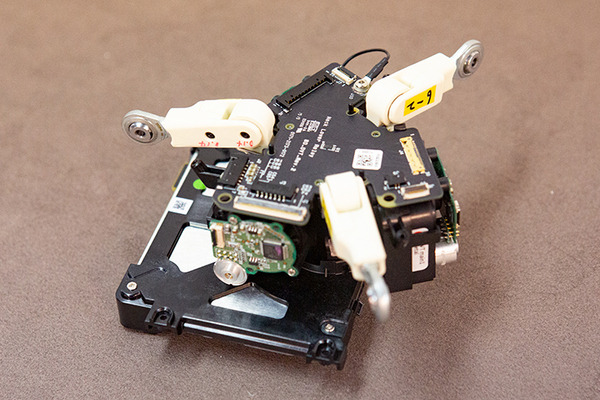
頭脳は2CPUにFPGA
頭脳(CPU)についても触れ、3種類のコンピュータで構成される。まったく異なるタイプのコンピュータボード(CPU)基板が2つ装備され(メイン/サブ)、それぞれLinuxで動作・通信を行っている。50個のセンサーからのデータを含めて認識系を19個のマイコンで処理し、意思決定や行動計画を行うのがメインコンピュータの役割。さらにFPGAも搭載し、CNN(ニューラルネットワーク)の推論などを担当している。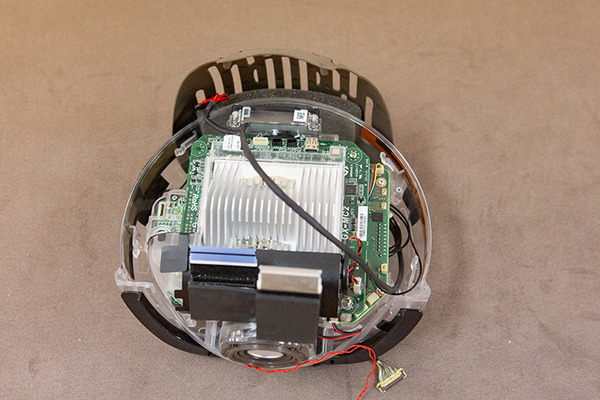
林氏は「ロボットは熱にはじまり、熱に終わる。どうやって冷やすかが重要で難しい。ガンダムはよく見ると通風のための穴がたくさん開いている。それがカッコよさの源泉であるが、実際のロボット開発でも空気の出し入れがポイント」と語った。今までF1やスーパーカーの空力開発に携わってきた林氏だけに、LOVOTの内部の空気の流れや冷却について解説する際は一層、熱がこもっていた。
全身各部のパーツの材質にもこだわった。耐久性と静音性(音)がトレードオフの関係にあるためだ。金属を使えば耐久性が上がるが稼働時の音がうるさくなり、樹脂を使えば静かになるが耐久性が下がる。
持ち運べる充電器をリリースして欲しい
イベントでは、一般の参加者からの質疑応答が行われた(その後でマスコミからの質疑応答があった)。一般の参加者からの質問は、いろいろな機器のコード類に引っ掛かって転ぶ、コード類を巻き込まないか心配、カーペットの毛足が長いので心配、持ち運べる充電器を作って欲しい(今はネストと呼ばれる大きな充電ステーションのみ)などの質問が出た。
特に持ち運べる充電器のリリースを希望するユーザーが多かったため、林氏は「充電時間と重さがトレードオフ、重くても速く充電できるモデルと軽くて充電時間がかかるモデルとどちらが良いか」とアンケートの挙手を促した。
出荷台数は? AIの処理は?
ロボスタ編集部から、出荷台数や売上を質問したが「出荷台数や売上は公開していない。今、注文を頂いた分は4月にお届けできる予定」との回答だった。当初、見込んでいた売上予定に対して、実際はどのような感想を持っているか、という問いに対して、林氏は「初速は良く、一時期停滞し、最近また加速している印象」と答えた。最近加速している理由は「出荷してから好評をいただいているため」と分析、顧客からの声として体験会で気に入って購入したが、一緒に生活してみるともっとよかった」というコメントを紹介し、好評な声が周囲に広がっているとした。なお、単体のSOLOと、2台セットのDUOの割合については8:2(SOLO:DUO)だという。
更にロボット単体(エッジ)とクラウド処理している内容を質問したところ「基本的にはネット環境がなくてもロボット単体で動くことができる。ただ、LOVOTの初期設定(アクティベーション)、アップデート、お手伝い機能、システムが正常に動作しているか等、一部の作業をクラウド側で行っていて、それらはLTE回線に接続できる環境のときに行われる」とした。更に「性格や判断、AIの推論等もLOVOT側で処理している。クラウドの依存度が低い理由は、生命感を出すためには機敏な反応を重視しているため(クラウド通信には時間がかかりタイムラグが生まれる)。また、LOVOTの様々な処理やAIの推論をクラウド側で行おうとすると、カメラや音声など家庭内の生データをクラウドに送る必要があり、容量が大きくてレイテンシー(反応性)に影響するとともにプライバシーの観点からもクラウドには送らず、LOVOT内で処理することが望ましいという判断」だとした。「そうは言っても、ソフトウェアの更新などによって性格や動きも変化していくので、できればLTEにつながる環境で使って欲しい」と続けた。
AIについては「画像認識や音声認識など、非常に多くの部分でAIを使っている。それはFPGAで処理するものもあれば、DSP等で処理しているものもある。クラウド側ではAI推論は使用していない」と答えた。
冒頭でも書いたが、想像以上にLOVOTの内部構造が細かく解説されたイベントだった。aiboやロボホンもそうだが、家庭用ロボット市場においては、オーナー同士のコミュニティの存在が重要だと感じる。今回、懇親会も用意され、一般の参加者にとってもLOVOTオーナーたちが語り合える良い機会になったと思う。
LOVOT特集 (ロボスタ)