NVIDIAは「Omniverse NuRecライブラリ」と「Cosmos世界基盤モデル」を発表し、ロボティクス開発を高速化する。AmazonやBoston Dynamics、Figure AIなど複数企業がNVIDIAの新技術を活用していて、NVIDIAはフィジカルAIとロボティクスの両面で、開発と実装の支援を加速したい考えだ。
ロボティクス開発を加速するNVIDIAの新技術
NVIDIAは2025年8月11日、ロボティクスソリューションの開発と展開を加速する新たな技術群を発表した。主な発表内容は「Omniverse NuRec 3D Gaussian Splattingライブラリ」と「Cosmos世界基盤モデル(WFM)」。
これらは大規模な世界再構築と空間リーズニング(空間的推論)を可能にし、ロボットの物理的に正確なシミュレーションを支援する。
「Omniverse NuRecライブラリ」と「Cosmos WFM」
「Omniverse NuRecライブラリ」は、センサーデータを活用して現実世界を3Dでキャプチャし、再構築やシミュレーションを行うレンダリング技術を提供する。「3D Gaussian Splatting」とは、点群データを滑らかに表現する手法であり、リアルな3Dモデル生成に寄与する。
また、「Cosmos WFM」はテキストや画像、ビデオのプロンプトから多様な合成データを大規模に生成できる世界生成モデル。これにより、ロボットのトレーニングに必要な多様なデータセットを効率的に作成可能だ。
さらに「RTX PRO Blackwellサーバー」と「DGX Cloud」の導入により、開発者は高性能なAIインフラを活用し、物理的に正確なデジタルツイン(現実の物理環境をデジタル上に再現したモデル)をどこでも開発できる。これにより、シミュレーションや合成データ生成、ロボット学習が大幅に効率化される。
数兆ドル規模の産業を変える
NVIDIAのレブ・レバレディアン氏は、「コンピューターグラフィックスとAIの融合がロボティクスを根本的に変革し、数兆ドル規模の産業を変える」と述べている。
Amazonやボストンダイナミクス、Figure AIも採用
オープンソースのロボットシミュレーションフレームワーク「Isaac Sim 5.0」と「Isaac Lab 2.2」もGitHubで公開されており、NuRecニューラルレンダリングやOpenUSDベースのロボット・センサー仕様を含む。「OpenUSD(Universal Scene Description)」は、異なる3Dデータ形式間の互換性を提供するオープン標準。
NuRecレンダリングは自動運転車向けシミュレーターCARLAにも統合されており、ForetellixやVoxel51のFiftyOneなど業界リーダーが採用している。
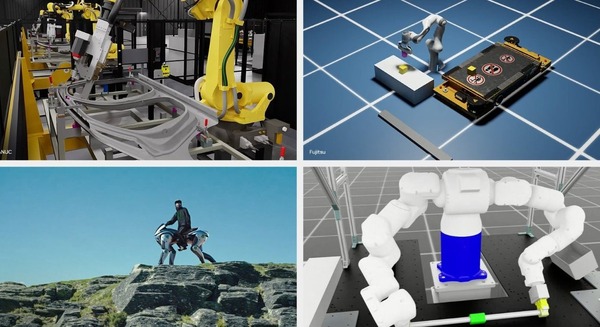
Amazon Devices & Services、Boston Dynamics、Figure AI、Hexagonなどの企業はこれらの技術を活用し、フィジカルAIの開発を加速している。
フィジカルAIの推論を強化する新モデル
Cosmos Reasonは、フィジカルAIとロボティクス向けの新しい視覚言語モデル(VLM)であり、ロボットが人間のように推論し、複雑なタスクを理解・実行できるよう支援する。視覚言語モデルとは、画像や映像とテキストを組み合わせて理解するAIモデル。
このモデルは、データのキュレーションやアノテーション(データに意味づけを行う作業)、ロボットの計画と意思決定、ビデオ解析など多様な用途に活用されている。UberやMagnaなどもCosmos Reasonを利用し、自律配送や交通監視の効率化を進めている。
NVIDIAはまた、OpenUSDの専門知識を育成するためのカリキュラムと認定プログラムを業界リーダーと共同で展開し、開発者エコシステムの拡大を図っている。
将来的な自動運転車やサービスロボットの実用化に大きく貢献
今回の発表により、NVIDIAはロボティクスとフィジカルAIの分野で、よりリアルでスケーラブルなシミュレーション環境と高度なAI推論を提供し、産業の変革を加速させることを目指している。これらの技術は、ロボットの開発効率を飛躍的に向上させ、将来的な自動運転車やサービスロボットの実用化に大きく貢献すると期待されている。
(この記事は2025年8月11日に米国で発表されたNVIDIAのプレスリリースを基に作成)