






NVIDIAが公開しているブログ「NVIDIA DRIVE ラボ ビデオシリーズ」では、自動運転ソフトウェアがどのように開発されているかについて紹介されている。この1年で20ものエピソードが取り上げられた。
今回は「バックミラーで確認:NVIDIA DRIVE ラボ、自動運転ソフトウェア開発の1年を振り返る自動運転の課題と革新を紹介するビデオシリーズ」と題し、この1年で取り上げた内容と今後の計画について説明されている。この記事はそれを引用・紹介したもの。
DRIVEラボのアプローチ
車両は経路を計画し、運転の決定を行う前に、車両の周囲全体を見て、状況を理解する必要がある。
DRIVEラボのアプローチは冗長化した多様なDNN(ディープ・ニューラル・ネットワーク)を使用している。DNNモデルでカバーする機能は交差点検出、信号機や交通標識の検出、交差点の構造の理解など、多岐にわたる。また、駐車スペースを見つける、センサーが遮られていないかどうかを検出するといった、複数のタスクにも対応できる。
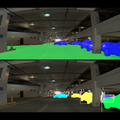
これらのDNNは歩行者や信号機を中心としたバウンディングボックス(長方形の枠線)を描き出すだけではなく、DNNにより、ピクセル単位まで画像を分解して精度を向上させることや、それらのピクセルの時間経過を追跡して正確な位置情報を得ることが可能。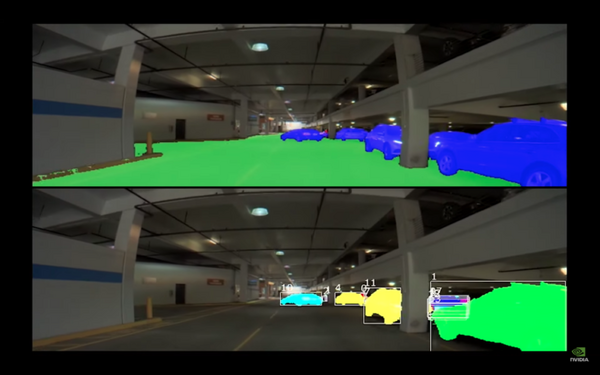
AutoHighBeamNetは夜間の運転のために、自動化された車両のヘッドライト制御を可能にするが、DRIVEラボのアクティブな学習アプローチは暗闇の中での歩行者検出を改善する。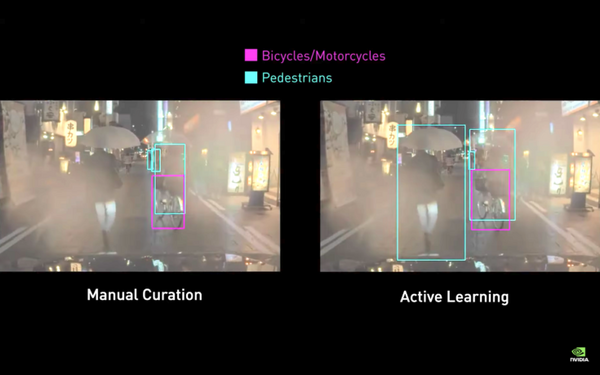
DNNを使用すると、2Dカメラ画像から3D距離を抽出して正確なモーションプランニングを行うことも可能。そして、NVIDIAの知覚能力は車両のあらゆる場所で機能する。
先の道路を予測する/衝突を回避する
自動運転車は環境を認識するだけでなく、他の道路利用者の動きを理解して安全な経路を計画しなければいけない。DRIVEラボではリカレントニューラルネットワーク(RNN)を用いて、自動運転車が物体の動きに関する過去の洞察を使用して未来の動き予測を計算する方法を説明してきた。
NVIDIAのSafety Force Field ソフトウェアはプランニングや制御を行うソフトウェアに多様性と冗長性を加える。このソフトウェアはバックグラウンドで常時稼働して、プライマリシステムからの制御をダブルチェックし、安全でないと判断されるアクションを拒否する。


DNNとソフトウェアコンポーネントは、自律走行車に使用される開発のサンプルにすぎない。この重大な課題には、データセンターと車両の両方で厳密なトレーニングとテストが必要。そして輸送手段が変化し続けるにつれて、車両ソフトウェアは適応できる必要がある。
今後発信予定のDRIVEラボのエピソードでは、こうしたトピックについて詳しく説明する予定。
NVIDIA関連記事
