
ソフトバンクとニコンは、光無線通信技術を連携して研究・開発していくことを発表した。それに伴って3月18日、2台のロボットがランダムに動いても双方向で追尾してトラッキングするビジュアル・サーボ技術(ロボティクス・ジンバル)を開発し、報道陣にデモを公開した。トラッキングにはAI画像認識技術が使われている。
今回の発表会では、2つの重要な技術が紹介されている。そのため少し混同しやすい要素があるので、詳しく整理して解説していきたい。
技術説明と会場で撮影したデモ動画を紹介する前に、このプロジェクトの狙いとポイントが解説された公式の動画が公開されているので紹介しておきたい。
■ソフトバンクとニコンのトラッキング光無線通信技術(公式)
光無線通信技術とはなにか
2つの重要な技術のうち、ひとつめの技術は「光無線通信技術」だ。両社は「6G」(第6世代移動通信システム)を見据えた技術として今後も「光無線通信技術」を共同で研究・開発していくとしている。光無線通信技術とはなんだろうか?
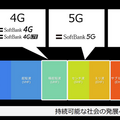
スマホや無線LANなど、現在の「4G」や「5G」は、いくつもの異なる周波数を使って通信が行われているが、電波の周波数は有限のため、従来の主流だった周波数帯を飛び出し、センチ波(3GHzから30GHz)やミリ波(30から300GHz)などの高い周波数帯の電波を国が移動体通信用に割り当てることで利用を広げてきた。
これまでの経緯と同様、やがてはまた更に高い周波数が求められるようになるだろう。更に高い周波数を求めていくと、やがては光無線通信に到達する。電波の送受信を「光」で行う方式で「6G」の通信方法のひとつとして期待されている。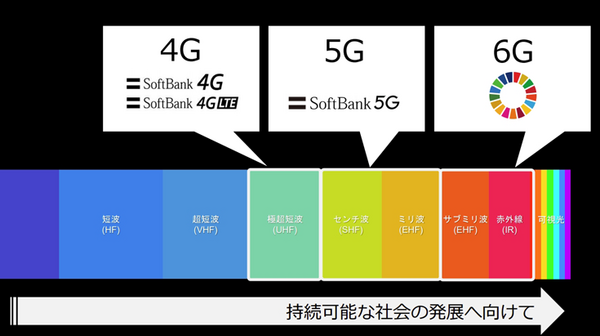
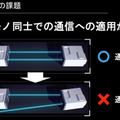
ところが「光」無線通信の実用化には大きな課題がある。ひとつは直進性が極めて高く、回り込みが苦手、送受信口がぴったり合致していないと通信できないという点、もうひとつは光を遮るものがあると通信できないという点だ。そのため、見通しがよくて固定された通信デバイス間では通信できるが、モバイルなどの移動体通信には不向きとされている。ここまでは一般的な「光無線通信技術」の内容となる。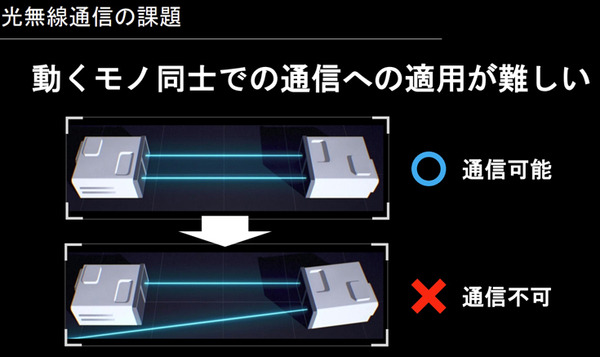
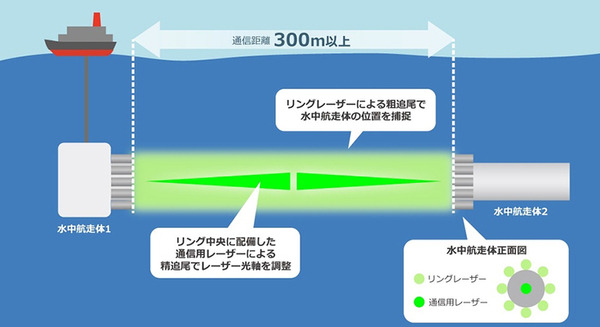
今回の発表でも光無線通信技術のユースケースとして、車車間通信(車両どうしの通信)、車街間通信(クルマとスマートシティの通信)、ドローンの通信などが紹介された。そして、もうひとつ重要なのが水中での通信だ。一般の無線の電波は水中では届かないが、光なら届けることができる。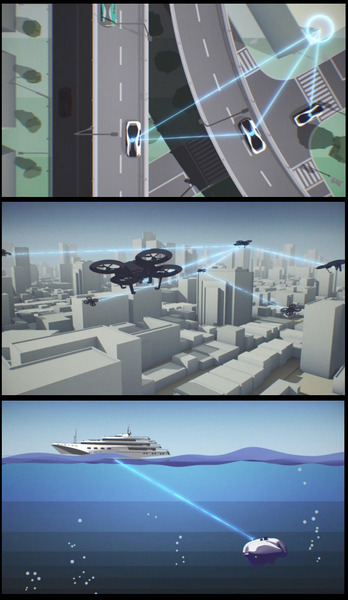
いずれも動くデバイスとの通信が紹介されているが、今解説したとおり、光無線通信ではモバイル機器と通信することが困難な課題がある。今回のソフトバンクとニコンが発表した技術は、課題の前者「直進性が極めて高く、送受信口がぴったり合致していないと通信できない」を解決するためのソリューションとなり得る。次の項で解説しよう。
トラッキング技術:通信相手を追従するビジュアル・サーボ
もうひとつの技術が今回の発表で注目したい点、ニコンの「ビジュアル・サーボ」だ。
光の送受信口が常にぴったり合致していないと通信が途切れてしまうという課題を、プロの撮影でよく利用されているジンバル(回転台)の最新技術で解決しようというものだ。
ニコンはカメラの三脚や雲台、ジンバルで培ってきた技術と、ディープラーニングなどのAI画像認識等を掛け合わせ、通信ユニット「ビジュアル・サーボ」を開発した。ちなみにニコンはあまり一般の消費者には知らせていないが、ロボティクス分野向けにインテリジェント・アクチュエータ・ユニット(モータ)の商品開発も行っている。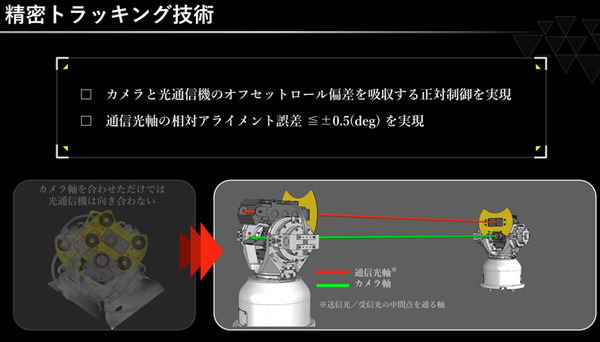
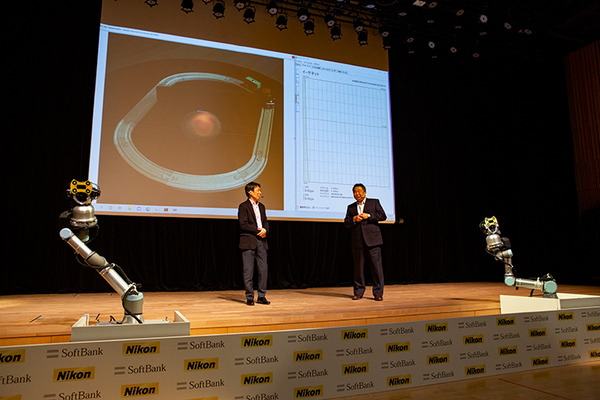
お互いのデバイスにおいて、光の送受信口を常にぴったり合致させて通信するためには、通信する相手がどこにいるのか、どの方向を向いているかを緻密に把握して、光軸が合う位置や向きに自らが動く必要がある。ニコンとソフトバンクはその実証に成功し、会場では動いている2基のロボットが常に光軸を合わせて、光無線通信を継続するというデモだ。通信相手を360度追尾追従することが可能なもので、この技術を使って光無線通信技術の実証実験に成功したことが「世界初」ということになる。ちなみにトラッキングはカメラ映像のビジュアル解析だけで行われている。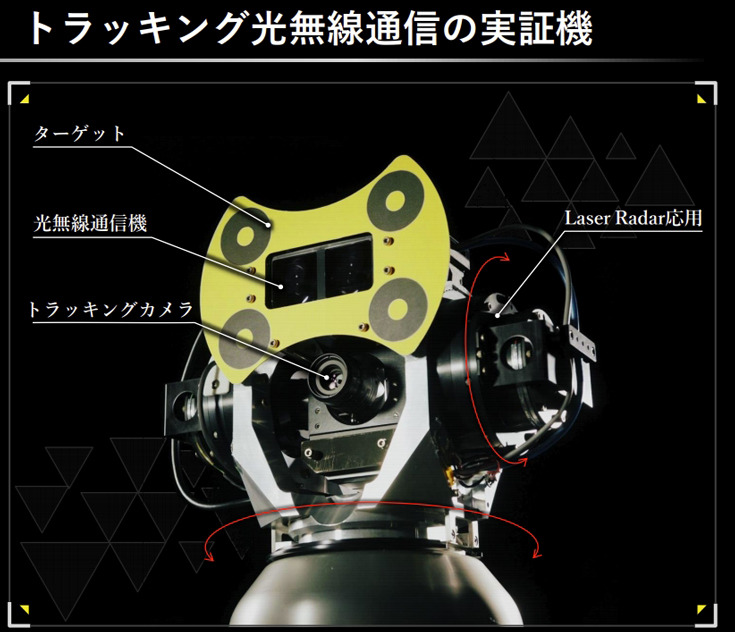

このトラッキング技術(ビジュアル・サーボ)は光無線通信だけでなく、既にあるさまざまな分野で活用が見込める技術だ。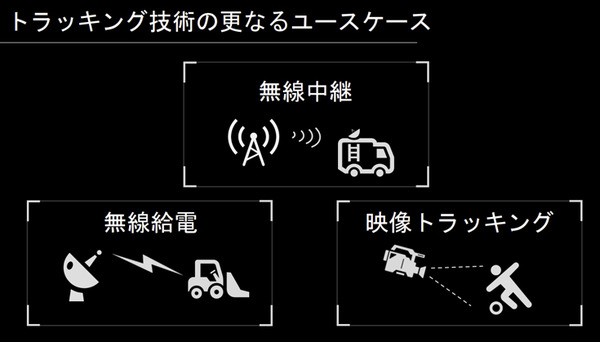
光無線通信とトラッキング技術のデモを公開
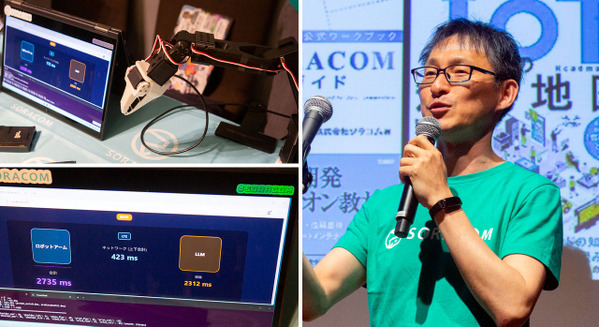
デモでは3つの端末が使われた。ひとつは動く車両模型とそれを映像データにするカメラだ。撮影している動画映像を向かって右のビジュアル・サーボ搭載のロボットに送る。
ここからが「光無線通信技術」と「トラッキング技術」のデモとなる。向かって右のロボットから左のロボットにカメラからの映像をリアルタイムに光無線通信で送信する。
もともと2台のロボットの送受信の光軸は合わされているので左のロボットに正常に送信され、左のロボットが受け取った映像はステージの後ろのスクリーンに表示される。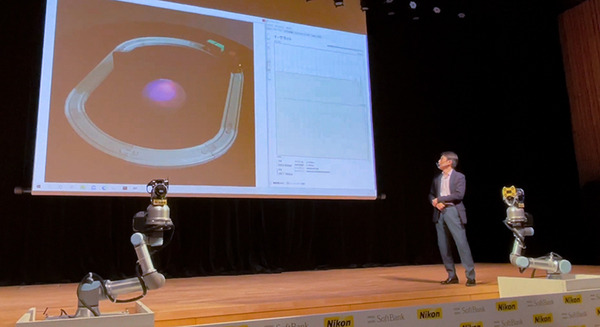
実際にリアルタイム通信をしていることを示すために、右のロボットと左のロボットの間に手をかざすと通信は途切れ、映像は固まった(止まった)。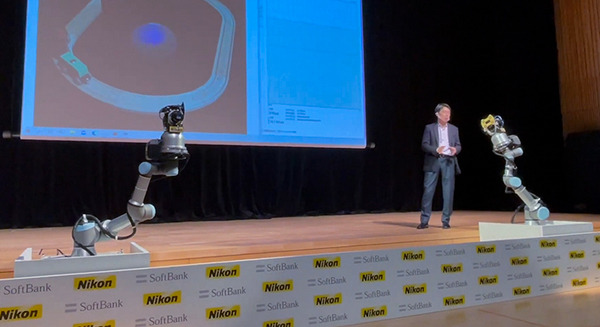
さて、ここからが「トラッキング技術」のデモだ。2台のロボットのアーム部分がお互いランダムに動き始める。当然、ロボットのハンド部分の光軸がはずれ、映像は停止してしまう・・・と思いきや、相互のロボットはアーム部分の妨害行為に影響されることなく、ハンドのジンバル部分が独立して動いて光軸を維持することで光無線通信を継続し、スクリーンの動画は停止せずに再生される。ハンドのジンバル部分に搭載されたカメラが相手のジンバルの傾きや距離を把握し、光軸を合わせて光無線通信を継続するしくみだ。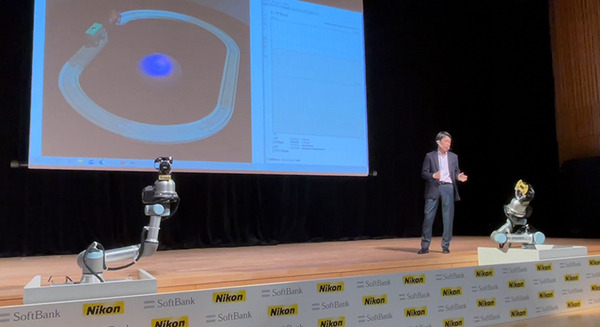
■Nikon and Softbank jointly announce
将来の展望
実証実験には成功したものの、実用化にはまだ多くのステップを踏むことが必要、それは今回登壇したソフトバンクとニコン両社とも感じている認識のようだ。例えば、今回のデモでは数mの距離で行われたが、実験ではそのとき使用していた通信機の限界距離にあたる100mでも行われ、それに成功しているという。どれだけ長距離でどれだけ高速に通信が可能か、などブラッシュアップしていく必要がある。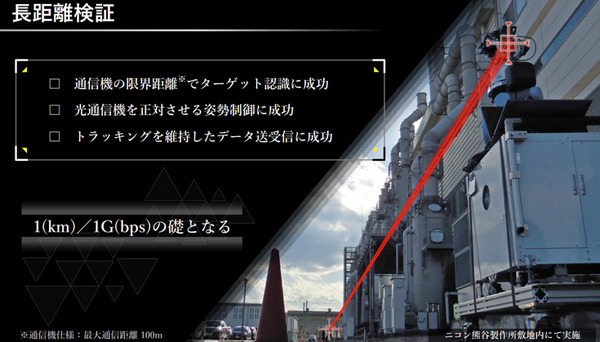
また、ニコンは「小型化も必要」と語った。現時点のジンバルのサイズでは搭載できるデバイスは限られてしまう。今後は小型化を考慮し、実用化にはどこまで小さくできるかもキーポイントになっていくだろう。