

NTTドコモと慶應義塾大学ハプティクス研究センターは、商用5Gを用いたロボットの高精細な無線遠隔操作に関する実証実験に成功した。
世界初となる技術実証
本実証では、低遅延スライシングの一つであるConfigured Grantを適用した商用5Gと、慶應義塾大学が開発したロボティクス技術「リアルハプティクス」を組み合わせ、繊細な力加減と手応えの伝達を安定的に実現することができた。
商用5Gを介してロボットの無線遠隔操作におけるConfigured Grantの有効性を実証した取り組みは、世界で初めてとなる。
端末から基地局までの間で発生する遅延や遅延の変動を抑制するConfigured Grantを商用5Gに導入し、その遅延改善効果とリアルハプティクスへの有効性を検証した。
Configured Grant技術の仕組み
Configured Grantは、基地局下の特定の端末に対して優先的に通信リソースを割り当てる方式のことで、モバイルネットワークの混雑状況によらず、無線区間における遅延やその変動を抑制する効果がある。
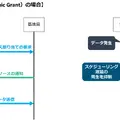
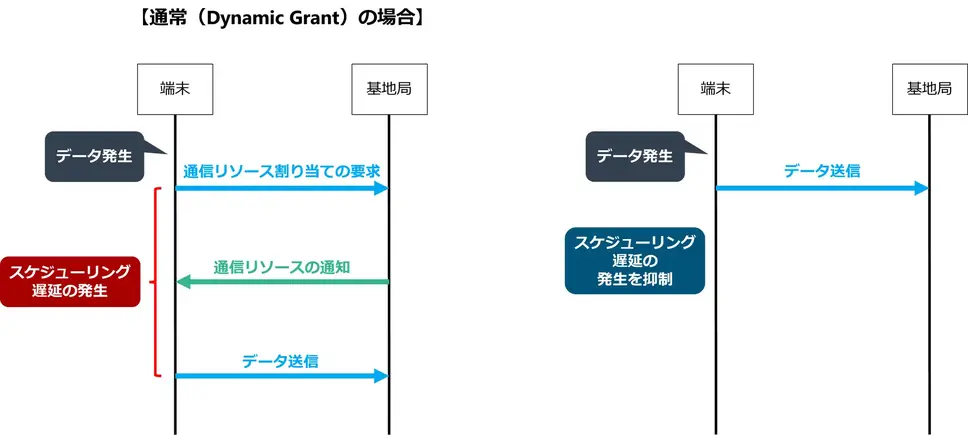
通常の端末が基地局に対してモバイルデータ通信を行う際は、Dynamic Grant方式に従って実施される。
送信すべきデータが生じた端末は、データの送信に先立って、送信に利用する通信リソースの割り当てを基地局に対して要求する。
要求を受け取った基地局は、基地局下の他の端末の通信状況を考慮しながら、リソースの割り当てを決定し端末に知らせる。その後、基地局はこのリソースを利用してデータを基地局に送信するという仕組みだ。
このとき、端末がリソース割り当て要求をしてから実際にデータを送信するまでの期間は、スケジューリング遅延と呼ばれる通信遅延となる。このスケジューリング遅延は、Dynamic Grantを採用する場合恒常的に発生し、かつネットワーク環境に応じて遅延量が変動するため、安定的な通信経路が求められる高度なロボットの無線遠隔操作において大きな障壁となる。
一方で、Configured Grantが適用された端末および基地局間での通信において、基地局は当該の端末に対して、ある期間においてその端末が独占的に利用可能な通信リソースをあらかじめ割り当てておく。
送信すべきデータが生じた端末は、リソースの割り当ての要求を行うことなく、当該の通信リソースを用いてデータを基地局に対して送信することができる。すなわち、ここではスケジューリング遅延の発生が抑制されるため、通信経路における遅延および遅延の変動が低減する。
実証実験の構成と結果
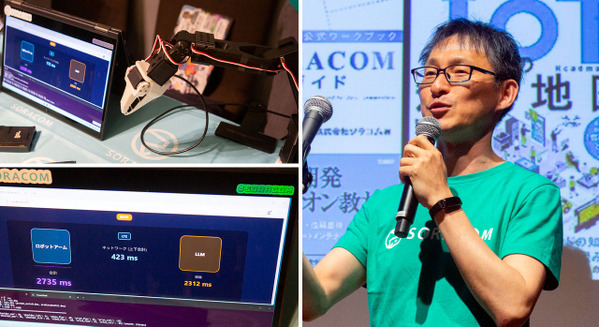
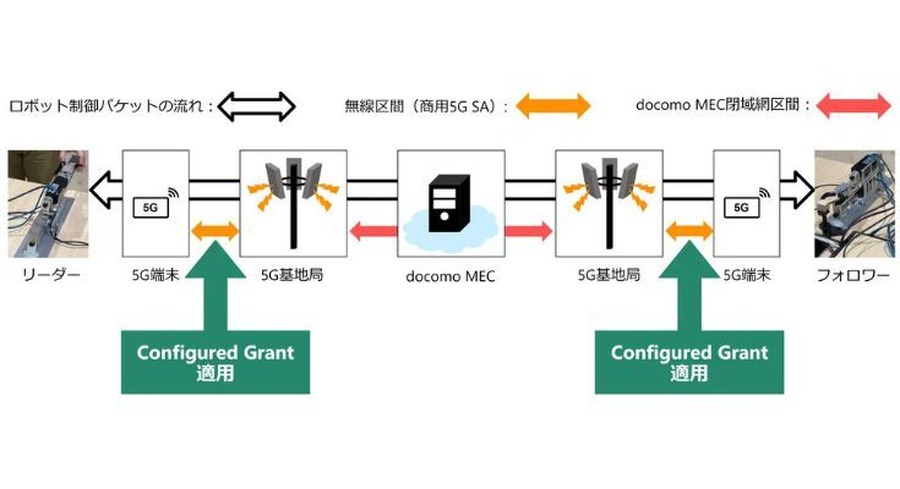
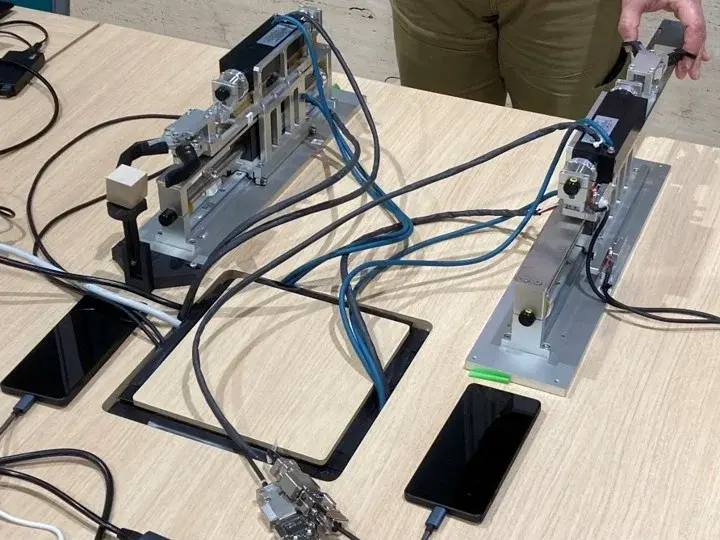
本実証では、ドコモの商用5G SAを利用し、リーダー・フォロワーと、ドコモが現在開発を進めるロボット用独自プラットフォームである「Bilateral Edge Platform」を実装したdocomo MEC上の仮想サーバとを接続したネットワーク構成をとっている。
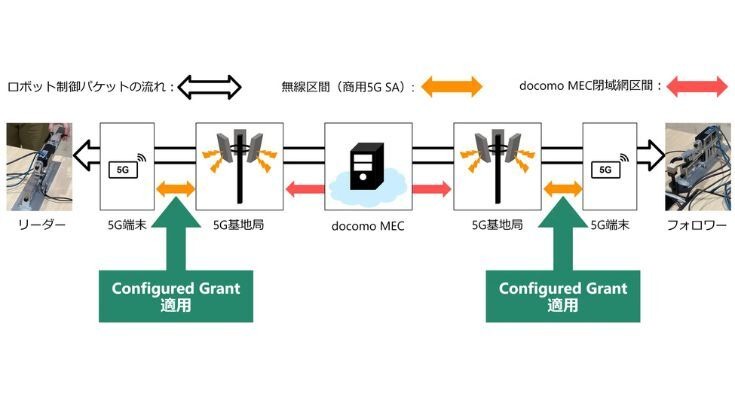
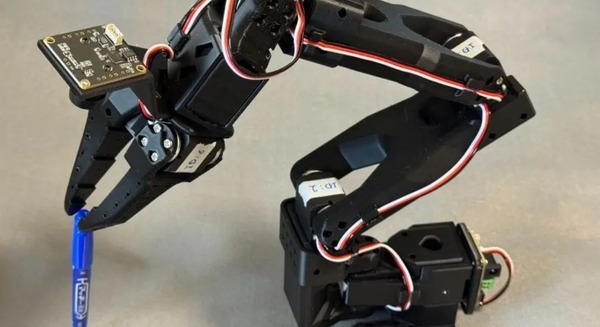
実験では、ハンド型のフォロワーとその操作部であるリーダーを用いて、硬い木片を把持したあと、ハンドを素早く操作して印加する力を変動させながら定められた時間内に運搬するという定型的なタスクを、Configured Grantを入れた5G SAを利用した場合と、Configured Grantを入れていない通常の5G SAを利用した場合の2通りで実施し、両者の違いを比較した。
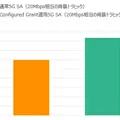
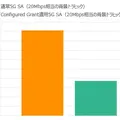
検証の結果、Configured Grantを入れた5G SAの場合、Configured Grantを入れていない通常の5G SAと比較して、平均通信遅延および遅延の変動の度合いを表す標準偏差が低下し、リアルハプティクスロボットの実用的な遠隔操作に求められる通信遅延要件を達成した。
性能向上の具体的な数値
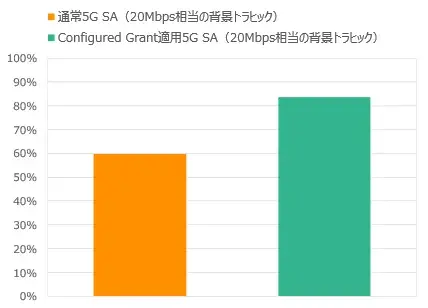
また、遅延特性の改善に伴って、リアルハプティクスのロボット操作の性能を表す指標において性能向上を確認。力触覚再現率では、Configured Grant適用の場合、指標値が40%、24ポイント向上し、高い精度の手応えのフィードバックが得られることが確認できた。
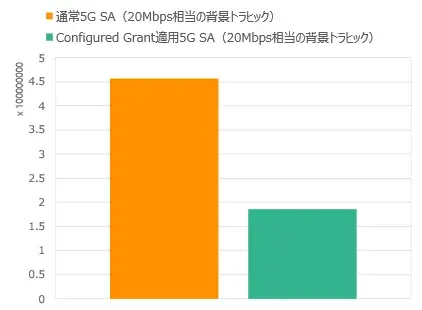
ロボット操作の滑らかさ指標である無次元Jerk Costでは、Configured Grant適用の場合、指標値が59%低下し、よりガタツキなく滑らかにロボットを操作できることがわかった。
これまでの取り組みと今後の展開
ドコモと慶應義塾大学は、これまでもモバイルデータ通信を介したリアルハプティクスの無線遠隔操作の実現に向けて、技術開発や検証を進めてきた。
モバイルデータ通信で発生する遅延の要因は様々だが、特に影響が大きいとされる無線区間の影響を改善できたことで、これまでは難しかった繊細かつ高度なロボットの無線遠隔操作を、通信の混雑の影響を受けにくい形で、安定的に実行できるようになる。
なお、本実証に関わる取り組みは、2026年3月2日(月)から5日(木)にかけてスペイン・バルセロナで開催されるGSMA主催「Mobile World Congress Barcelona 2026」のNTTグループブースにて展示される予定だ。