








ソニーグループは2021年12月7日に「Sony Technology Day」の中で発表した世界初の技術を盛り込んだソニーのマニュピレーターを、ソニー本社で報道関係者に向けて初披露する体験会を実施した。
この日、初めて発表された世界初のマニピュレーター技術は、オンラインイベント「Sony Technology Day」の中で披露されたロボットとは異なり、顔がついたヒューマノイド(上半身)形態のロボットに組み込まれていた。
体験会は人数を制限して実施され、世界初の新しいマニュピレーター技術のほか、VRゴーグルに組み込める4K+4Kの高精細1インチOLEDディスプレイやEPTS技術の体験コーナーも設けられていた。
「Sony Technology Day」での発表の様子は速報としてお伝えしているので合わせてお読み頂きたい。
関連記事「【速報】ソニーが世界初のロボットハンド技術を披露 未知の物をやさしく壊さずつかむマニピュレーター」
今回は体験会の様子と、この新技術の詳細を解説しよう。

世界初「繊細な人の手を再現するマニピュレーター」技術
世界初とは「未知物体に対する任意方向の滑り予測を数理モデル化」したことで、「できること」を大雑把ながら解りやすく表現すると「どんなものでもやさしくつかめる」技術。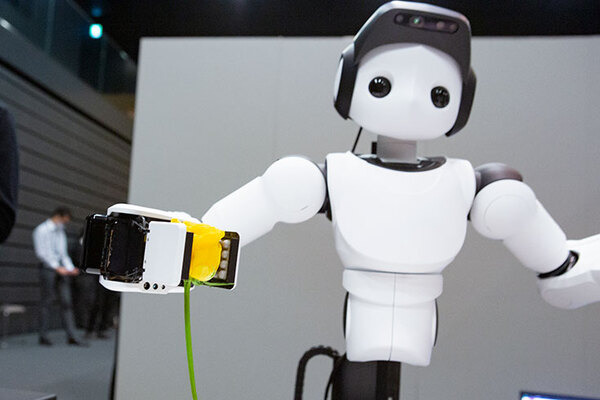
ソニーは人に役立つロボット技術の研究を行っていて、今回の発表もそのひとつ。人に役立つロボットを開発するには、多様な物体を取り扱うハンド技術(マニュピレーター)が必要であり、壊れやすいものであっても取り扱えることが重要とした。
DNNも機械学習も使わず、数理モデルで実現
最近の流行では通常、そこで物体が何かを認識することで予め学習しておいた握力でつかみにいく、と考えそうなものだが、今回のソニーのアプローチは全く逆の発想だ。
物をすべて学習するのは大変な作業で手間と時間がかかる。そもそもどんな物でも、見たこともない未知の物でも、やさしくつかめれば、物をひとつひとつ学習したり認識する必要はないという考えから今回の技術は生まれた。
そのため、今回のシステムにはビジョン(カメラ)はないし、ディープラーニング(DNN)も使っていなければ機械学習もおこなっていない。数理モデルを使って「物がすべる量」からつかむチカラを求め、触覚センサーだけで物を把持しようというわけだ。触覚センサーとは実際は2種類の、合計168個ものセンサーで構成されている。

どんなものでも優しくつかむ仕組み
基本的な原理としてはこうだ。
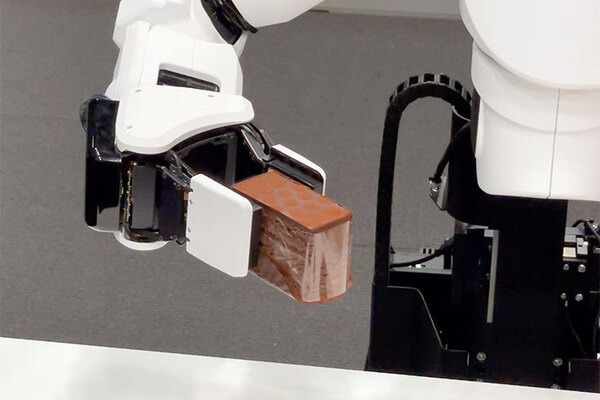
まず、人がロボットハンドの内側に物を持って行くと、それをセンサーで検知して、ロボットは自律的につかむ動作に移る。ここでポイントとなるのは外観は片側16個のゴム突起で構成されたハンドだ。ゴム突起は複数の圧力センサーと連携している。
ハンドはモノを挟み込んでつかむが、手の中にある多数の測距センサーを使って物の位置や形状を高精度に把握する。滑りにくいように中心を持つためのセンシングというべきか。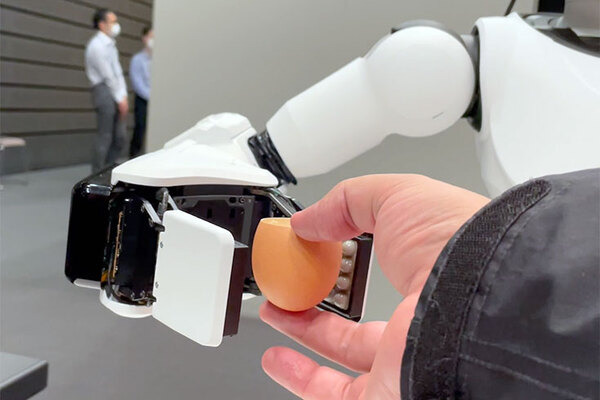
判別した物の形状によって位置を決めてつかむが、このとき物が壊れないように持つチカラを調整してつかむ。挟む指には突起ゴム1個あたりに複数のセンサーが設置されていて、突起ゴムを通して力の大きさや力の方向を検知、「滑る」予測数値からどのくらいのチカラでつかむべきかを推測してつかむ。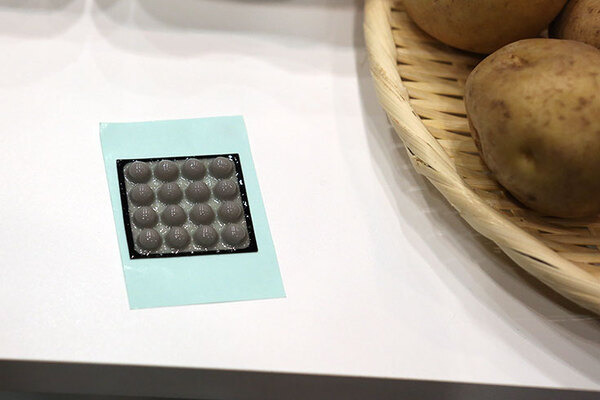
突起ゴムを通してセンサーが検知した「滑り」量は画面上に表示され、どの方向にどれくらいの滑るチカラがかかっているかを表示する。この数値から、つかむチカラの適切量を求める数理モデルを開発した。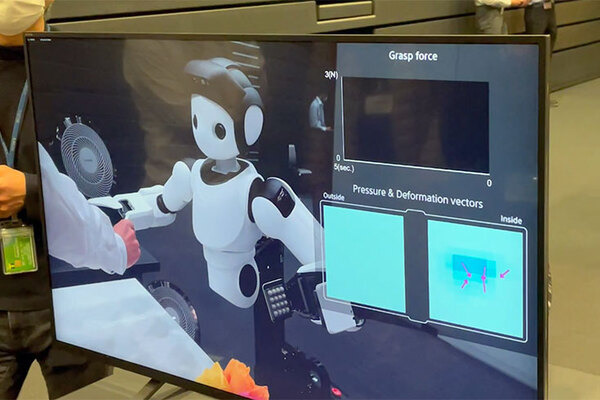
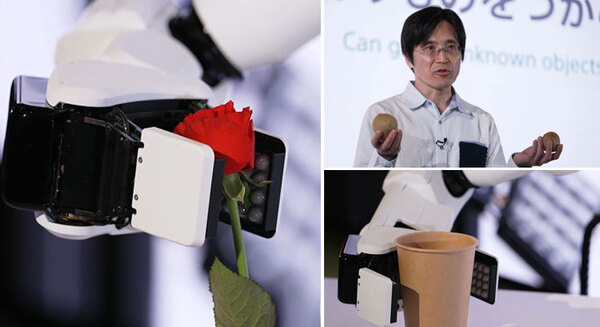
できるだけ長回しのデモの動画を紹介したい。下記はソニーグループ株式会社 R&Dセンターの坪井利充氏による解説付きのデモ動画。報道陣に説明する様子、解りやすいのでたっぷりとご覧頂きたい。
■世界初 人と同じようにやさしくつかめるマニュピレーション技術のデモと説明
「物体がどう滑ろうとしているのか」で、結果的に柔らかさがわかる
人間が柔らかいものをつかむときは、これから持つものを目で見て判断し、柔らかさを予測するが、ロボットはそれらの判断はおこなっていない。物が柔らかいかどうかも知らない。ロボットは指で触れたセンサーで滑らずに持てるチカラでつかんでいるのだが、それが結果的に「優しくつかむ」ことに繋がっている。
「滑る」という言葉から、ヌルヌルやツルツル滑るものを連想しがちだが、表面が滑るものを持てるわけではない。むしろ表面が滑るものは持つことができない。表面が滑ると、滑り落とさずに物を正確につかむチカラを測ることができないためだ。
とても難しい表現なので繰り返すと、物体をつかむチカラには2種類あると捉える。落とさないようにつかむチカラと、壊さないように持つチカラだ。やさしくつかむとは、その2つのチカラの狭間にある。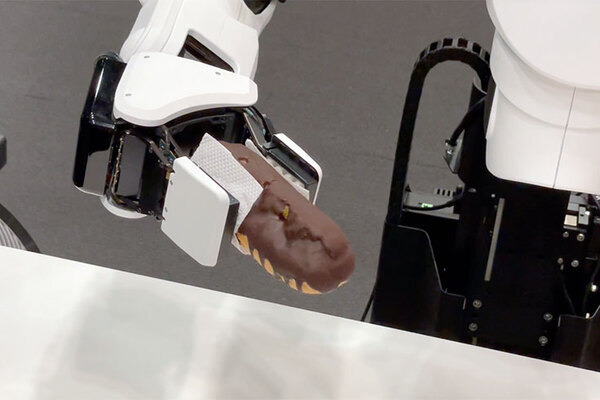
柔らかい紙コップにドリンクを注ぐとき、少しだけ気をつかう?
デモの中で、ビンの中の水(デモではビーズを使用)を紙コップに注いでいるが、これは紙コップに水が入ると重さが重くなっていくため、つかむチカラを強く調整していく必要がある。
人間はそれを何気なく行っているが、紙コップのような柔らかく、チカラを入れすぎると潰してしまい兼ねないものにドリンクを注ぐ時に気を遣うという人も少なくないはずだ。
紙コップの重さはドリンクが入れば変化していき、それに合わせて紙コップをつかむチカラの量を増やしていく(加減していく)こと。それをロボットで実践していることを今回のデモで実現できているところに注目して欲しい。
■柔らかい紙コップにドリンクを注ぐデモ












