
東京大学大学院工学系研究科の長藤圭介教授らの研究グループは、金沢大学、九州大学、堀場製作所と共同で、燃料電池の実生産の開発に資する自動実験・自律探索のシステム「FC-ROPES」を開発した。
燃料電池の発電のコア部分である触媒層は、ナノサイズのカーボン・白金触媒・ポリマー・空隙が三次元的に複雑に配置された構造で、混合分散・塗布乾燥といった「お好み焼き」にも通じる粉体膜形成プロセスで作られている。実生産に用いる乾燥工程の温度履歴などのプロセスパラメータの探索は、ヒトの手作業による実験と実生産設備を用いた大規模実験を用いて行われることが多く、時間的にも規模的にも効率が悪いという問題があった。
今回発表された研究では、エレベータに乗るサイズの小型システムの中で、1cm × 1cmという小さなサンプルを試作しつつ自動実験・自律探索を行い、それぞれ従来の10倍以上の効率を実証した。これは従来の100倍以上の速さでプロセスのデータと実サンプルを自動で生成することに相当する。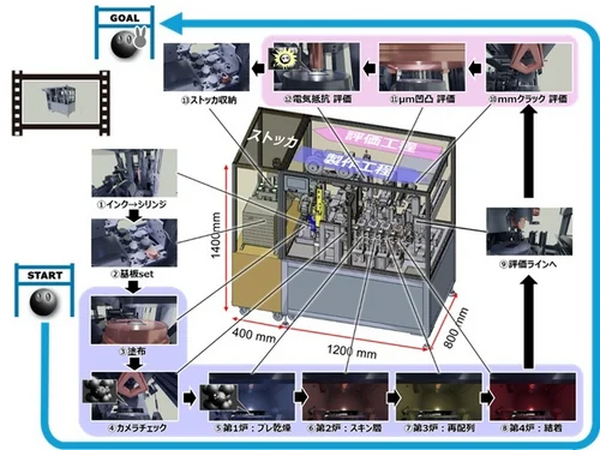
研究の背景
燃料電池自動車(FCV・HDV)や定置用燃料電池発電機は今後の水素社会に欠かせない発電装置であり、品質・コスト・納期(QCD)の要である生産技術開発のスピードアップが課題となっている。その解決策のひとつとして、自動実験・自律探索システム、すなわちラボラトリーオートメーションの活用があるが、これまで粉体膜プロセスを対象とし、かつ実生産を想定したものは無かった。
研究の内容
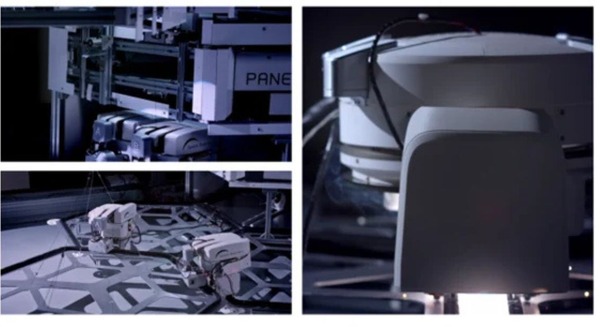
本研究では、2023年3月に公開されたNEDOのFCV・HDV用燃料電池技術開発ロードマップ記載の、触媒層生産技術における高品質塗工面形成技術の確立、およびPI(プロセス・インフォマティクス)を用いた材料・プロセス探索に関する課題に対応し、燃料電池生産技術開発の自動実験・自律探索システム、「FC-ROPES」のうち、塗布乾燥工程に着目し、ダイコータでの触媒インク塗布、熱風乾燥での触媒膜乾燥という「塗布乾燥ROPES」を開発。
大きく次の3つの要求機能を設定した。
1:通常エレベータにて搬入出可能であること
2:少量小型サンプルでハンドリング可能であること
3:粉が実生産ラインと同じ物理現象を感じること
そして、それぞれに対応する設計解を以下のように実現した。
1:プロセスラインと評価ラインの連結
2:1cm×1cm枚葉式サンプルの採用
3:ディスペンサと多段階炉で実生産ラインをスケールダウン。
自動実験の実証において、乾燥炉安定化に平均約2分、乾燥時間は約6分、評価計測時間は約1分、基板準備・基板ストアに約1分、1サイクルタイムあたり計10分のケースを設定。これは、100サンプルとデータを17時間で作成することに相当する。さらに、自律探索の実証においては、ベイズ最適化を用いてパラメータ候補数約500の中から24回という少ない試行回数で、スキン層形成ステップ・再配列ステップの2段乾燥工程の結果を見出した。
今後の展望
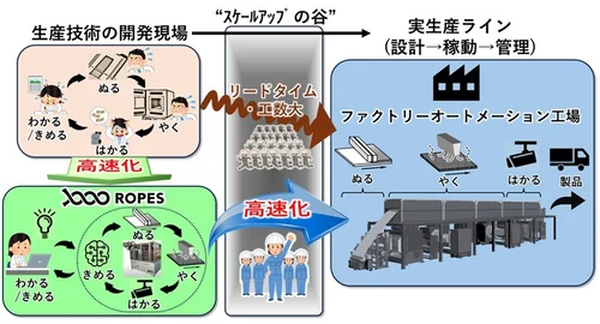
本研究で開発した「塗布乾燥ROPES」は、これまでの研究開発を高速化するだけでなく、QCDの要である実生産ラインの設計・稼動・管理へのスケールアップの谷を超える第2の高速化にも貢献する。その生産技術開発力の向上に資する本研究成果を、日本の燃料電池システムメーカ(旧AFC: オールスターFC)だけでなく、材料メーカ、生産設備メーカにも活用していただくべく、受託試作計測ビジネス化、ROPESそのものの商品化を目指すとしている。
また、今回は塗布乾燥工程に着目して自動実験・自律探索を実証したが、その上流工程であるインク調合に関する自動実験・自律探索、すなわち「混合分散ROPES」および、「塗布乾燥ROPES」との一貫生産技術開発の実証に関する研究開発を、次期NEDO事業「水素利用拡大に向けた共通基盤強化のための研究開発事業」にて、「生産技術のためのプロセスインフォマティクスプラットフォーム」として取り組むとしており、本成果および次期事業は、2025年2月公開のNEDOロードマップ記載の「DX技術開発による研究開発力向上」に資するテーマであり、2035年のFCV・HDV用燃料電池の性能目標の達成に貢献するとのことだ。