



9月7日(月)に開催された第4回 html5jロボット部 勉強会に行ってきました。今回のテーマは「ROS / ROS.jsについて学ぼう」です。
HTML5j ロボット部
https://www.facebook.com/html5j.robot

今回の勉強会のテーマはこちら。
ロボット・アプリケーション作成を支援するライブラリとツールを提供するオープンソースミドルウエアであり、Pepperでも正式対応したとされるROS。今回はROS.jsテーマにその前提としたROSについて概要と初歩的な部分を学んでいただければと思います。
会場は渋谷dots.
開放感のあるレイアウトに、おしゃれなソファーなどもあり、いい雰囲気の空間です。
イベント&コミュニティスペースということで、通常はワーキングスペースとして一時間から使用することができ、今回のようなイベントとしての利用も行われているそうです。

スケジュールを見てみると、html5jロボット部ありました。

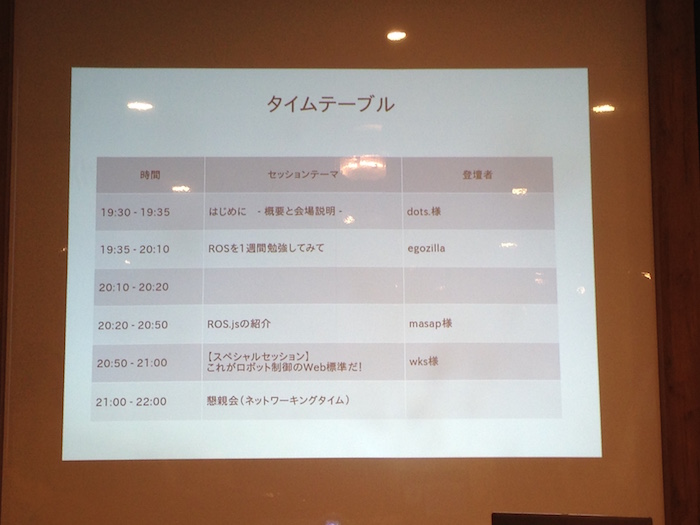
勉強会のスタートです。
最初に会場スタッフの小沢さんから、渋谷dots.について。

普段はワーキングスペースとして運営しているそうなので、みなさまからのご利用もお待ちしているそうです。
渋谷dots.
https://eventdots.jp/space
ここから勉強会本編です。
最初に html5j ロボット部の egozilla さんからの発表「ROSを勉強してみて」です。
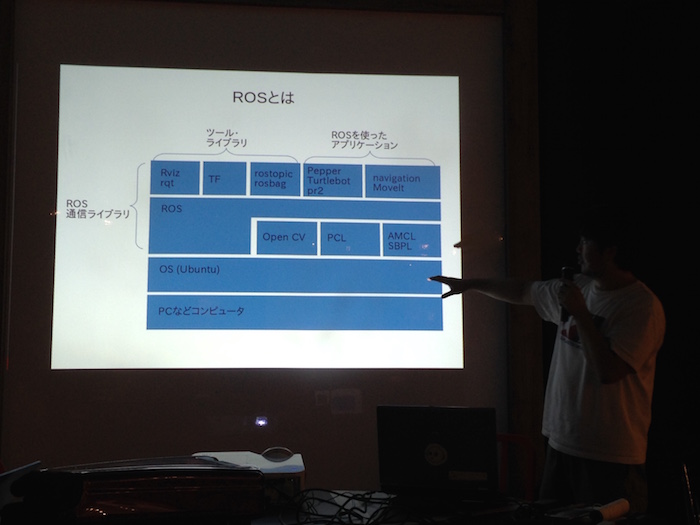
ROSとは、Robot Operating Systemの略で、ロボット開発のためのソフトウェアの集合体です。基本的にはオープンソースで開発されています。ロボット工学分野の研究・開発におけるコードの再利用することが目的です。
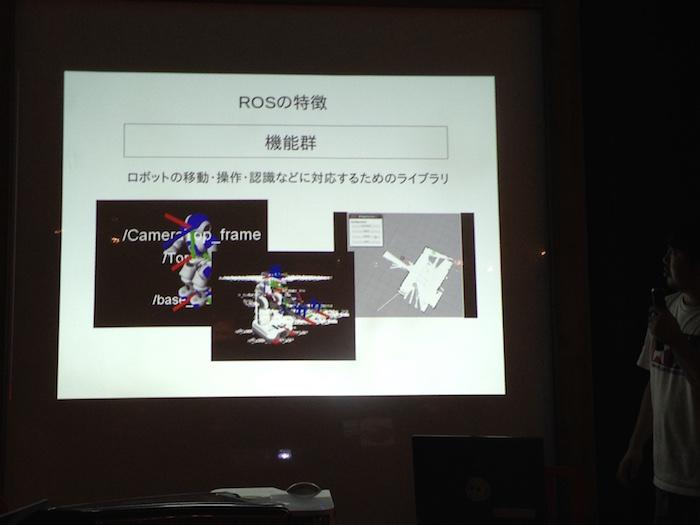
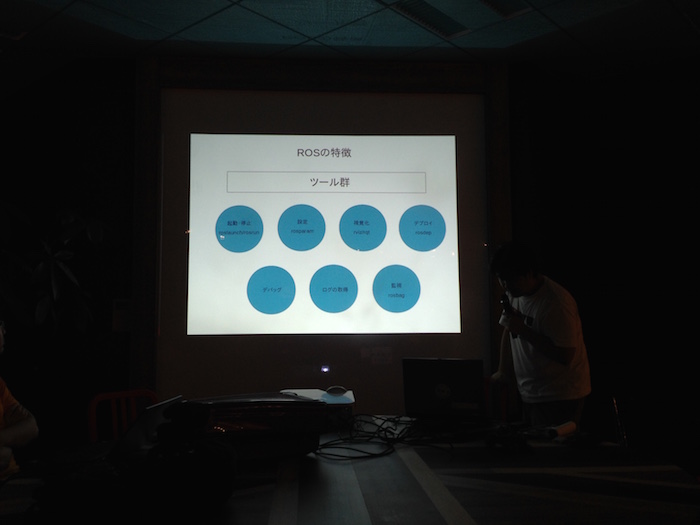
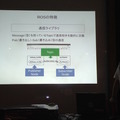
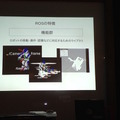
ROSの特徴は、「通信ライブラリ」「機能群」「ツール群」「エコシステム」「ディストリビューション」です。

「基本用語/通信方法」についてです。
「シミュレーター/可視化ツール」です。
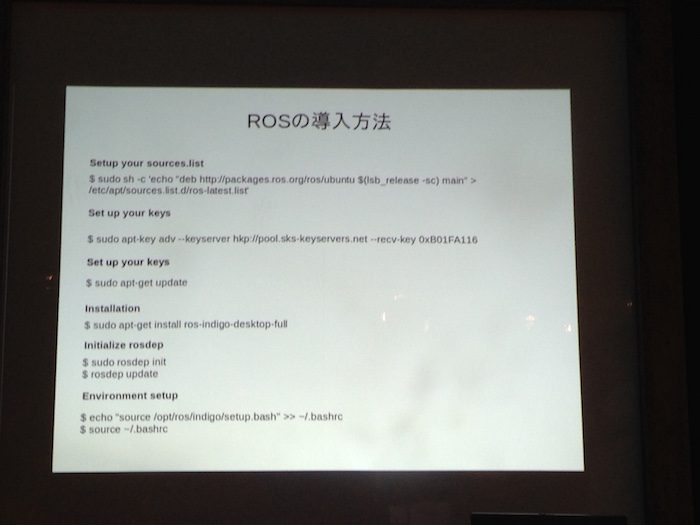
ROSの導入方法です。
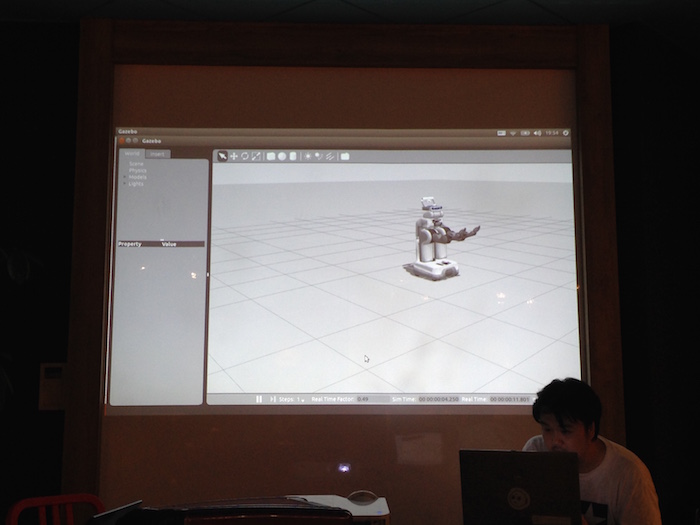
ここからはデモになります。
こちらは、PCキーボードのコマンドでロボットを操作してみるというデモです。

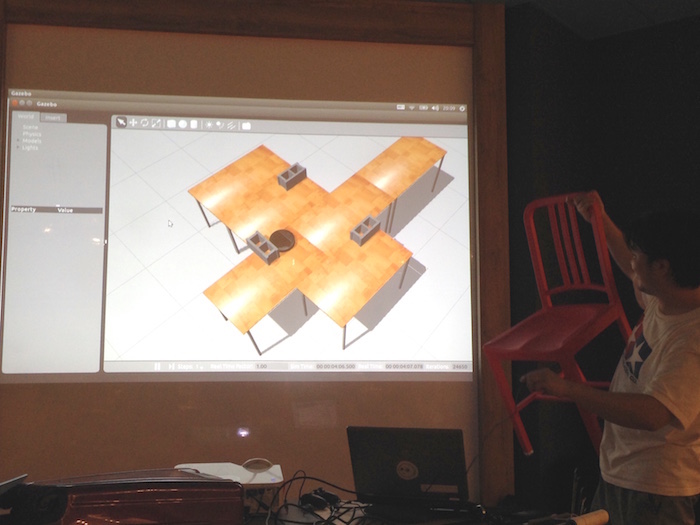
次は、分散画像処理のデモです。具体的には、カメラに赤いものを見せた時にはロボットを前に進ませて、青いものを見せた時には後ろに進ませるというものです。
試しに赤い椅子をカメラに見せると、バーチャルロボットが前に進みました。
最後にegozillaさんによるまとめです。思ったほど時間的な学習コストはかからず、アップデートが早いので思い立ったらすぐに始めた方がいいそうです。

推薦図書は『ROSではじめるロボットプログラミング』です。
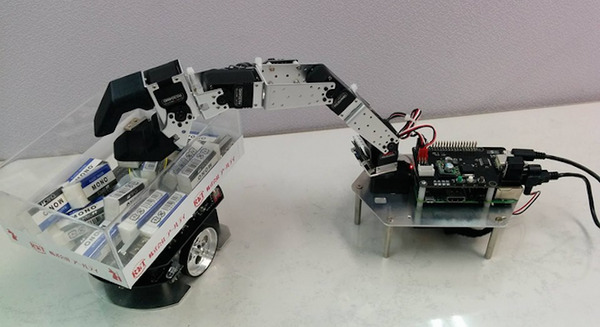
次は、masapさんからの「ROS.jsについてとROS.jsをつかったデモンストレーション」。WebSocket経由でルンバを動かしてみるというものです。
ソフトウェア構成図はこちらです。

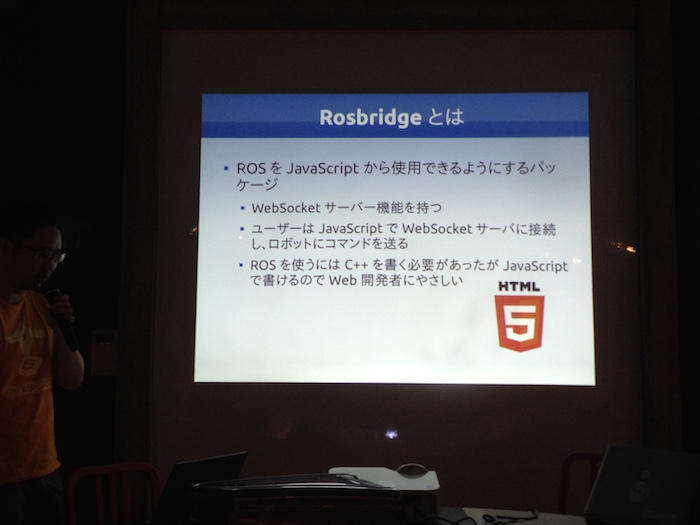
Rosbridgeについての説明です。ROSをJavascriptから使用できるようにするパッチでなので、Web開発者にやさしいです。
で、ROSは必要なのか?と疑問の方への説明です。人間がルンバを操縦するならROS無しでも可能ですが、自立移動をするためにROSが必要です。
SLAMについてです。Simultaneous Localization and Mapping の略で、自動的に地図を作成して、自分の現在位置を推定するものです。ROSを使うとSLAMが可能になります。
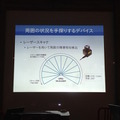
SLAMをするためには、周囲の状況を手探りするためのレーザースキャナが必要となります。

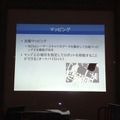
ROSにはレーザースキャナのデータを計測して自動マッピングする機能があり、マップ上の場所を指定してロボットを移動させることができます。
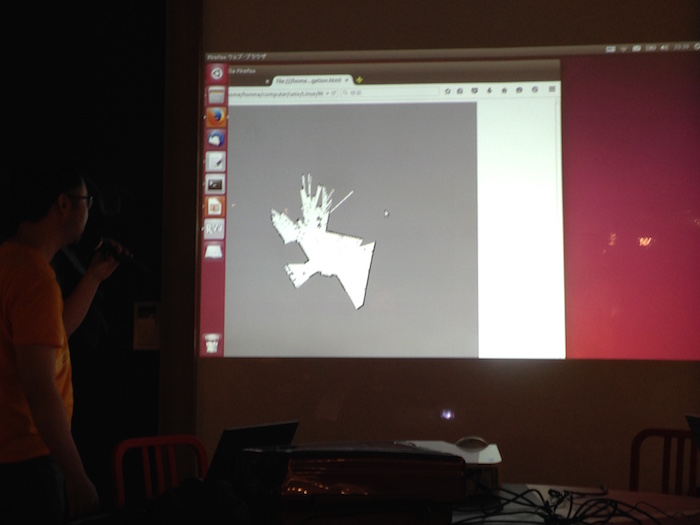
今回の会場である渋谷dots.のマッピングをしてみたのがこちらです。
ROSを使い、WebSocket経由で実際にルンバを動かしてみます。

窓際を指定して動作スタート!ルンバが健気に移動していきます。皆で無事たどり着くか固唾を飲んで見守ると、指定場所で無事ストップしました。成功です!パチパチパチ!

ちなみに500番台のルンバだと改造すればUSB接続ができるので、ROSで動かすのにオススメだそうです。また、研究用のiRobot Create 2もROSで動かすにはオススメですが、まだ日本未発売だそうです。
今回のスライドはこちらにあります。
http://www.slideshare.net/honmamasashi1/rosjs
続いて、若狭さんから「web標準技術だけでロボ」です。
まず、この動画を見てみましょう。
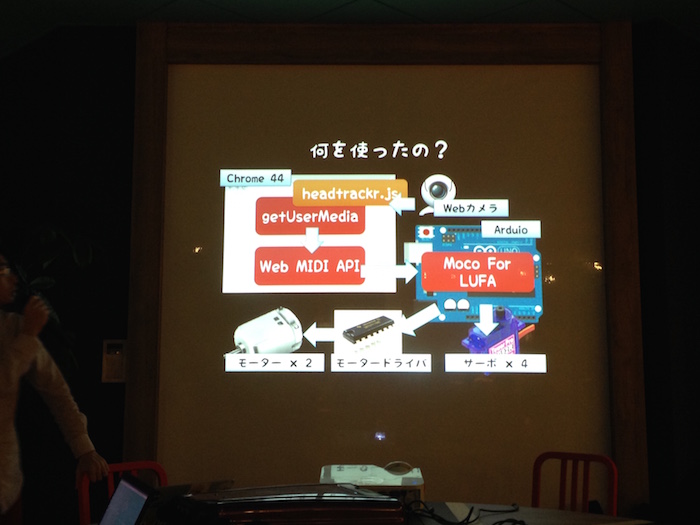
Androidタブレットを使い、web標準技術だけで動くロボットです。顔はブラウザ(chrome)で描いていて、ChromeにはMIDIを認識する機能がついたのでそれを使っています。こちら、Maker Faire Tokyo 2015にいたロボットじゃないですか。
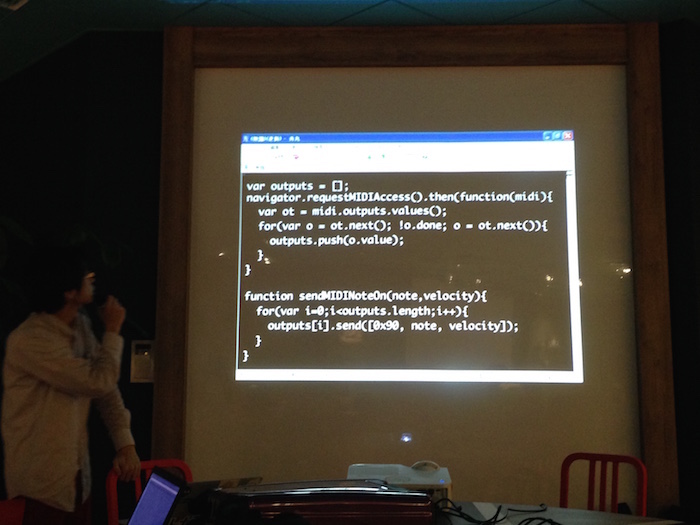
秀丸に書かれた code の量はそう多くないです。
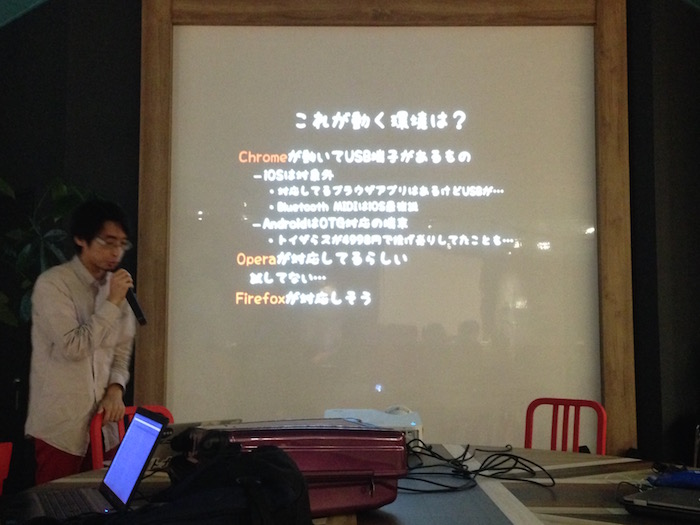
このロボットは、Chromeが動いてUSB端子があるものです。Operaも対応していて、Firefoxも対応しそうです。
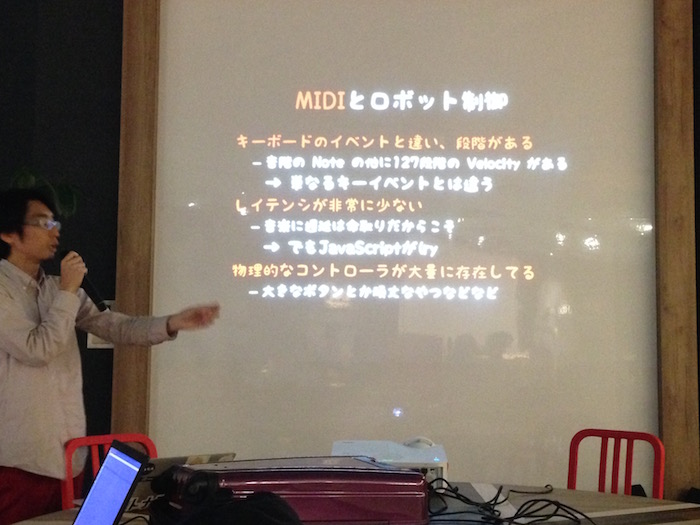
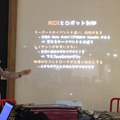
MIDIとロボット制御です。MIDIを使うといろんな特徴があります。キーボードのイベントと違って段階があったり、レイテンシが非常に少なかったり、物理的なコントローラが大量に存在していたり。音楽で使われているゆえの特徴ですね。
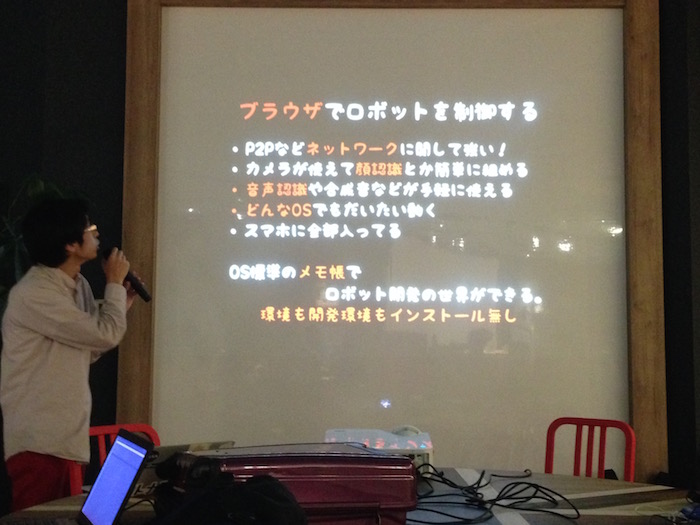
ブラウザでロボットを制御すると、OS標準のメモ帳でロボット開発が行えます。環境も開発環境もインストールなしで出来ちゃうんです!
まとめです。とりあえず、ROS.jsやる前に、MIDIでロボット作ろうぜ!
今回のスライドはこちらにあります。
http://www.slideshare.net/wakasamasao/web-52501761
発表は以上で終了です。
勉強会のあとは、懇親会です。みなさまお疲れ様でしたー。
(おまけ)渋谷dots.が素敵な空間で気に入りました。みんなも一回行ってみるといいと思います。


































{kind=link}