米ロボティクス企業のFigureは、ヒューマノイドロボットの最新モデル「Helix 02」を発表した。単一のニューラルシステムが画像から直接ロボット全身を制御し、部屋全体にわたる器用で長時間の自律動作を可能にする。
Helix 02は、歩行、物体操作、バランス制御を統合した連続システムとして機能する。昨年発表されたHelixがヒューマノイドロボットの上半身を制御できることを示したのに対し、Helix 02はその制御をロボット全体に拡張した。
4分間の連続自律作業を達成
Helix 02は、フルサイズのキッチンで食洗機から食器やコップなどの取り出したり、棚に収納したりなどの作業を約4分間にわたって自律的に実行した。
この作業は、歩行、物体操作、バランス制御を統合した61の滑らかな動作で構成され、リセットや人間の介入なしに完了する。
作業中、ロボットは繊細な物体を持ちながら歩行し、両手が塞がっている際には腰で引き出しを閉じ、足で食器洗い機のドアを持ち上げるなど、全身を道具として活用。単一のニューラルネットワークが、ミリメートル単位の指の動きから部屋全体の移動まで、4桁の動的範囲にわたる動作を生成している。
3層のシステムアーキテクチャ
Helix 02は「System 0、System 1、System 2」という3層アーキテクチャで構成される。各システムは異なる時間スケールで動作する。
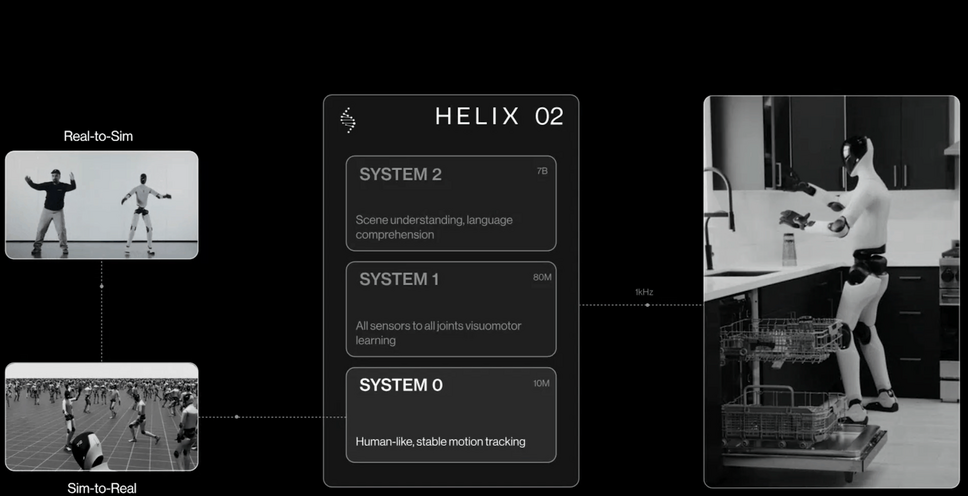
System 2は、シーンの解釈、言語理解、行動の順序付けなど、目標についてゆっくりと推論。System 1は200Hzで動作し、知覚を全身の関節目標に変換する。System 0は1kHzで実行され、全身のバランス、接触、協調を処理する。
System 0は、人間のような全身制御の基盤モデルである。1000時間以上の人間の動作データから学習し、109,504行の手作業で設計されたC++コードを単一のニューラルネットワークに置き換えた。1000万パラメータのニューラルネットワークで、全身の関節状態と基本動作を入力として受け取り、1kHzで関節レベルのアクチュエータコマンドを出力する。
シミュレーション環境では、200,000以上の並列環境で広範なドメインランダム化を用いて訓練され、実機ロボットへの直接転送を可能にしている。
全センサー入力、全関節出力の統合制御
System 1は、元のHelixでは上半身を制御し、関節状態と画像から読み取っていた。Helix 02では、すべてのセンサーに接続し、ロボット全体を制御する。
入力には、頭部カメラ、手のひらカメラ、指先の触覚センサー、全身の固有受容感覚が含まれる。出力は、脚、胴体、頭部、腕、手首、個々の指を含むロボット全体の関節レベル制御となっている。
手のひらカメラと触覚センサーは、Figure 03の新しいハードウェア機能だ。手のひらカメラは、物体が頭部カメラから遮蔽されている際に手の中の視覚フィードバックを提供する。各指先に埋め込まれた触覚センサーは、3グラムという小さな力を検出でき、ペーパークリップを感じるほど敏感である。
高度な器用さを実現する4つのタスク
Helix 02の触覚センサーと手のひらカメラは、純粋な視覚ベースのポリシーを超える操作タスクを可能にする。Figureは、多指の器用さの最前線にある4つのタスクを実演した。
1.ボトルのキャップを外すタスク
ロボットは、容器を滑らせたり潰したりすることなく、キャップを取り外すために連続的で制御された回転を適用しながらボトルを安定させる必要がある。

2.薬箱から錠剤を見つけて取り出すタスク
ロボットは、錠剤が頭部カメラから遮蔽されている場合でも、オーガナイザーから単一の小さな錠剤を見つけて抽出する必要がある。

3.注射器から正確に5mlを押し出すタスク
ロボットは、可変抵抗と厳しい許容範囲にもかかわらず、正確な量を分配するために注射器のプランジャーを進める必要がある。

4.散らかった箱から金属片を取り出すタスク
ロボットは、物体が重なり合い、互いに遮蔽し、相互作用中にシフトする山から小さな金属部品を抽出する必要がある。Figureの製造施設BotQから実際の金属片を取り出すようすが実演された。

今回の実演でFigureは、4分間の自律タスクでは61の滑らかな移動操作動作を実行。触覚センサーと掌カメラによる精密動作、そして手足だけでなく腰や足も連動させる全身協調動作を披露した。
成果はまだ初期段階のようだが、全身自律制御がもたらす可能性を示している。