芝浦工業大学システム理工学部の桑原央明准教授は、ロボットハンドによる「把持(つかむ)」と「検査(知る)」を同時に行う新しい非破壊検査技術「InSIGHT Grip」を開発した。
この技術は、モーター情報のみで把持力と加振を制御する独自技術によって高価な力覚センサーを不要としながら、対象物を優しくつかみ、その内部状態を推定するものだ。従来は別々に行われていた作業工程と検査工程の一体化が可能になる。
大型装置や工程の分離がもたらす生産現場の課題
農産物の熟度判定や工業製品の劣化診断において、対象を壊さずに調べる非破壊検査の需要が高まっている。しかし、現在主流となっているレーザーや音響を用いた検査手法は、正確な情報を得るために装置が大型かつ高価になる傾向があった。
また、収穫や選別といった「作業」と「検査」が異なる工程として実施されることが多く、これが生産現場におけるコストや時間の増加を招く一因となっていた。
同研究室ではこれらの課題を解決するため、最小限の構成で「作業」と「検査」を一体化させる手法を構築した。
力覚センサーレス制御と振動解析で「つかむ・測る・知る」を統合
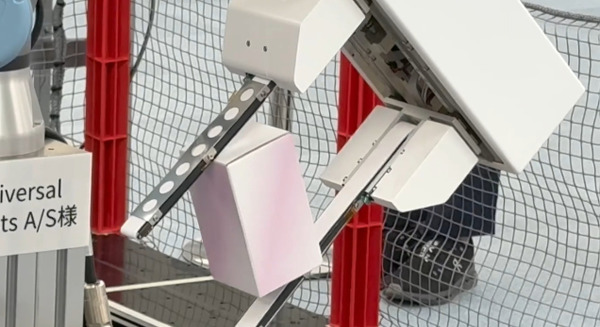
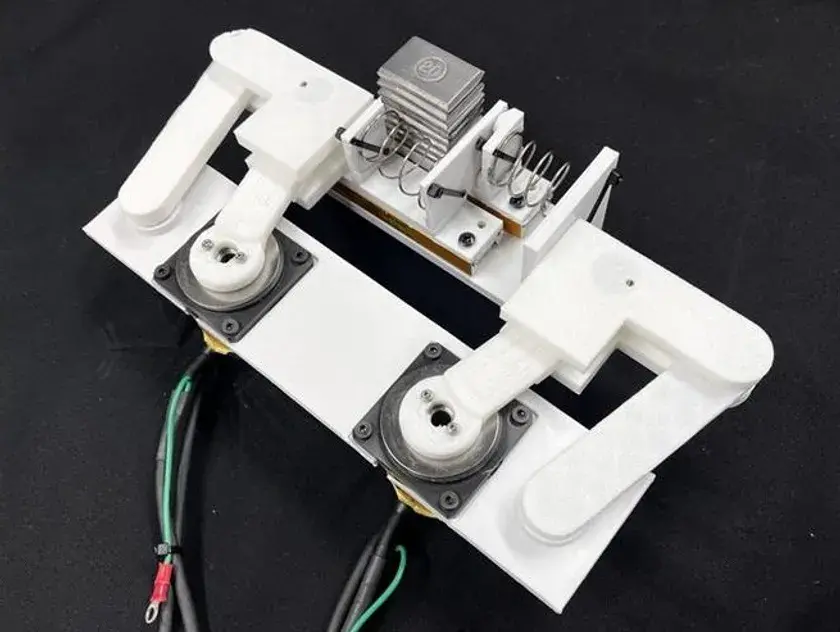
本技術「InSIGHT Grip」は、最小2つのモーターで駆動するコンパクトなロボットグリッパーによって構成されている。通常、物体を壊さずにつかむには高価な力覚センサーが必要だが、この技術ではモーターの回転数と電流値から力を推定する独自技術(特願2025-135922で出願中)を活用している。

これにより、力覚センサーレスでありながら対象物を優しくつかむ制御と、微細な振動を与える加振制御を同時に行うことが可能となった。
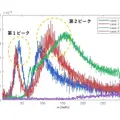
具体的には、物体をつかみながら特定の周波数で加振し、その応答を解析することで、2つの共振ピークを抽出する。
第1ピーク付近の周波数帯では「物体全体の運動」、第2ピーク付近の周波数帯では「表面付近の運動」を反映していることに着目。この2つの差分を算出することで、内部の「機械インピーダンス(硬さ)」を導き出す。
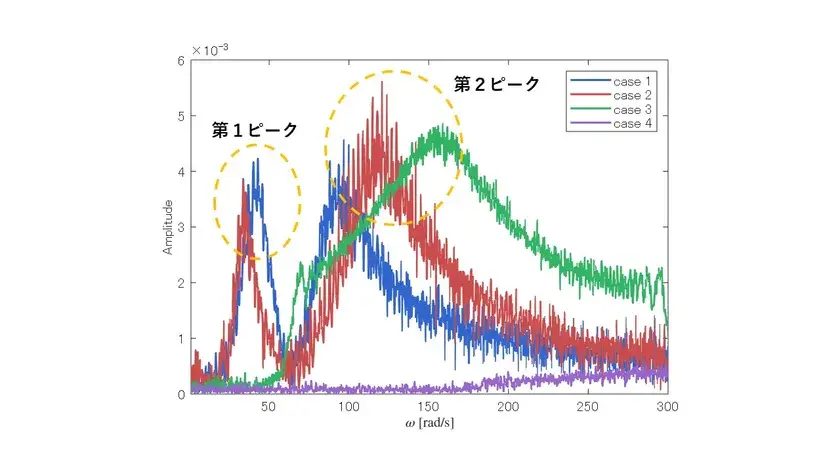
この原理を用いることで、メロンのように「表面は硬いが内部は熟して柔らかい」といった、外見や表面の接触だけでは判別が困難な内部状態を、つかんだ瞬間に把握できることを実機検証により確認している。
あらゆる産業を支える次世代の触覚インフラを目指して
この成果は、愛知県の「第20回わかしゃち奨励賞 応用研究部門」で優秀賞を受賞した。今後は、本技術の社会実装に向けて段階的に取り組みを進めていく方針だ。
まずは果実の熟度推定精度のさらなる向上を図り、その後、マニピュレータや無人搬送車(AGV)と連動した、選別と収穫を同時に行うシステムの実証を進める。
本技術は農業分野にとどまらず、工業用部材の劣化診断、医療、建設分野など、幅広い領域への展開が期待される。最終的には、触覚情報から対象の状態を理解する能力を「触覚知」と定義し、これを産業界の共通基盤として確立することで、人手不足の解消や食品ロスの削減、インフラの安全維持に貢献する新たな技術基盤の構築を目指す姿勢を示している。