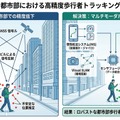
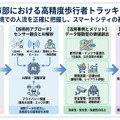

高層ビルが立ち並ぶ都市部では、衛星測位システム(GNSS)の電波が建物に反射したり遮られたりして、位置推定の精度が大きく低下する。この現象は「アーバンキャニオン(都市の峡谷)」と呼ばれ、数メートルから数十メートルの誤差が生じることも珍しくない。特に視覚障害者やロービジョンの方にとって、「道路のどちら側の歩道を歩いているか」を正確に把握できないことは、安全な移動を妨げる深刻な問題である。
カメラを使った視覚的な位置推定も考えられるが、プライバシーや計算負荷、照明条件への依存といった課題があり、実用性に限界がある。カリフォルニア大学サンタクルーズ校のShahar Dubiner氏らの研究チームは、GNSSと慣性センサー(加速度計・ジャイロスコープ)のデータを地図情報と組み合わせ、粒子フィルタで統合する手法を提案した。この論文では、歩道レベルの精度を実現するマルチモーダル融合アプローチの設計と評価が報告されている。
都市峡谷課題
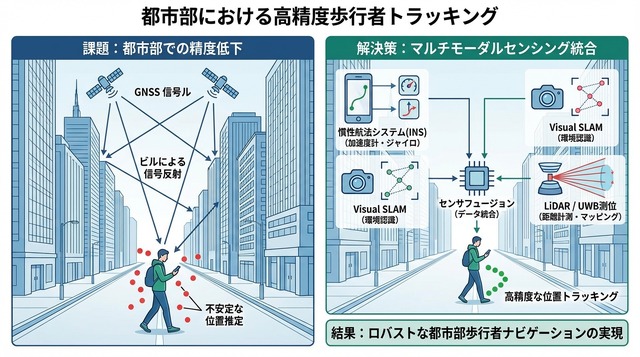
GNSS信号は本来、複数の衛星から直線的に届く電波の到達時間差から位置を計算する。しかし都市部では、ビルの壁面で反射した電波(マルチパス)や、建物に遮られて衛星が見えない状況(遮蔽)が頻繁に発生する。その結果、推定位置が道路の反対側にずれたり、数十メートル単位で飛んだりすることがある。
視覚障害者向けのナビゲーションでは、「正しい歩道」を示すことが極めて重要である。道路を横断すべきタイミングや、交差点での進行方向を判断するには、横断方向の誤差(across-street error)を最小限に抑える必要がある。従来のGNSS単体では、こうした歩道レベルの精度を安定して提供することが困難であった。
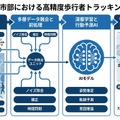
融合の設計
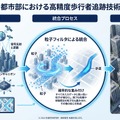
本研究では、GNSSと慣性航法(IMU:Inertial Measurement Unit)の推定値を、粒子フィルタ(Particle Filter, PF)で統合するアーキテクチャを採用している。粒子フィルタは、多数の仮説(粒子)を確率的に追跡し、観測データとの整合性に応じて重み付けを更新する手法である。各粒子は歩行者の位置と速度の候補を表し、時間とともに尤もらしい状態へ収束していく。
重要なのは、GNSSの不確実性(推定誤差の大きさ)を動的に考慮する点である。GNSS受信機は位置推定と同時に誤差の共分散行列も出力するため、信号が良好なときはGNSSを重視し、マルチパスや遮蔽が疑われるときは慣性推定や地図制約を優先する仕組みになっている。これにより、環境に応じて各センサーの寄与を柔軟に調整できる。
RoNIN推定
慣性航法の推定には、RoNIN(Robust Neural Inertial Navigation)と呼ばれる機械学習ベースの手法を用いている。RoNINは、スマートフォンなどに搭載されたIMUの加速度・角速度データから、歩行者の移動軌跡を推定するニューラルネットワークモデルである。従来の慣性航法では手動で設計した積分処理が主流であったが、RoNINはデータ駆動で歩行パターンを学習するため、より柔軟な推定が可能になる。
ただし、慣性航法には原理的にドリフト(誤差の累積)が避けられない。加速度を二重積分して位置を求めるため、センサーノイズやバイアスが時間とともに蓄積し、長時間の推定では大きなずれが生じる。そのため、RoNIN単体では絶対位置の精度に限界があり、GNSSや地図との統合が不可欠である。
地図制約PF
粒子フィルタに地図からの空間的事前情報を組み込むことで、確率的なマップマッチングを実現している。具体的には、建物の占有領域は通行不可能として粒子の重みをゼロにし、道路や歩道以外の領域(公園の芝生、私有地など)は歩行の可能性が低いとして重みを下げる。この制約により、物理的にあり得ない軌跡が排除され、歩道に沿った推定へ自然に収束する。
カメラを使わずに歩道と道路を区別できるのは、この地図制約の効果である。例えば、粒子が道路中央に飛んだ場合、その位置は歩行者が通常いない領域なので重みが低下し、次のステップで歩道側の粒子が優勢になる。OpenStreetMapなどの公開地図データを活用すれば、追加のインフラ整備なしに多くの都市で適用できる点も利点である。
評価方法
実験は、サンフランシスコ中心部のダウンタウンエリアで実施された。高層ビルが密集し、GNSS信号が特に不安定な6つのルートを選定し、実際に歩行者が端末を持って歩いたデータを収集している。各ルートは数百メートルから1キロメートル程度で、交差点や狭い路地、ビルの谷間など、測位が困難な状況を含んでいる。
評価指標は、歩道の正しさ(sidewalk correctness:推定位置が実際の歩道上にある割合)、位置誤差(平均・中央値・最大値)、横断方向の誤差(across-street error:道路を横切る方向のずれ)の3種類を中心に設定された。これらは歩行者ナビゲーション、特に視覚障害者支援において最も重要な指標である。比較対象として、GNSS単体、慣性のみ+PF(地図制約あり)、GNSS+RoNIN+PF(提案手法)の3パターンで性能を測定した。
結果と示唆
実験の結果、GNSS+RoNIN+PFの統合手法は、ほとんどの指標でGNSS単体を大幅に上回った。特に歩道の正しさと横断方向の誤差において顕著な改善が見られ、道路のどちら側かを正確に判定できる割合が向上している。興味深いことに、慣性のみ+PFも、歩道判定や横断方向誤差ではGNSS単体より優れた性能を示した。これは、地図制約とIMUの短期的な精度が、GNSSの大きなジャンプを補う効果があることを示唆している。
この技術は、視覚障害者向けナビゲーションアプリや、歩行者AR(拡張現実)、配送ロボットのラストワンマイル誘導など、幅広い応用が期待される。一方で、地図データの品質や更新頻度への依存、都市以外の環境(郊外や屋内)への一般化、端末の携行姿勢や個人差の影響といった課題も残されている。今後は、異なる都市やデバイスでの検証、リアルタイム実装の最適化、地図情報の自動更新メカニズムなどが研究の焦点になるであろう。