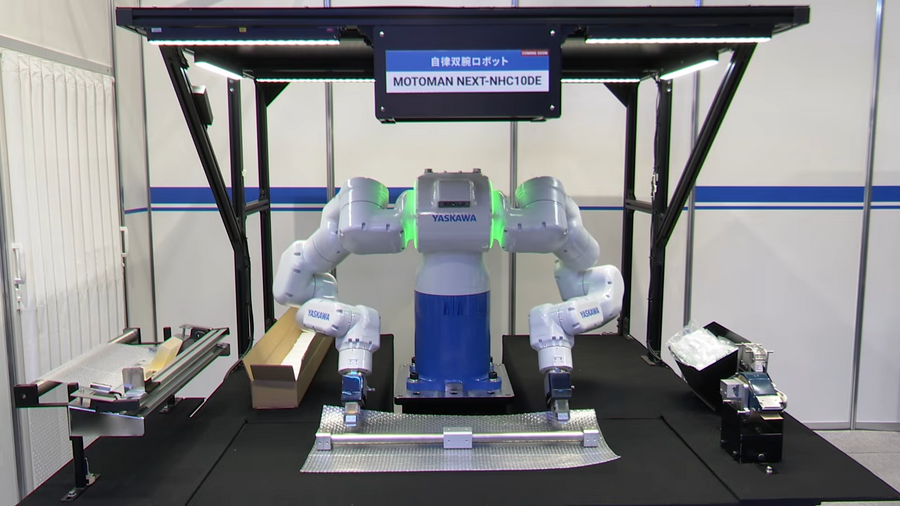





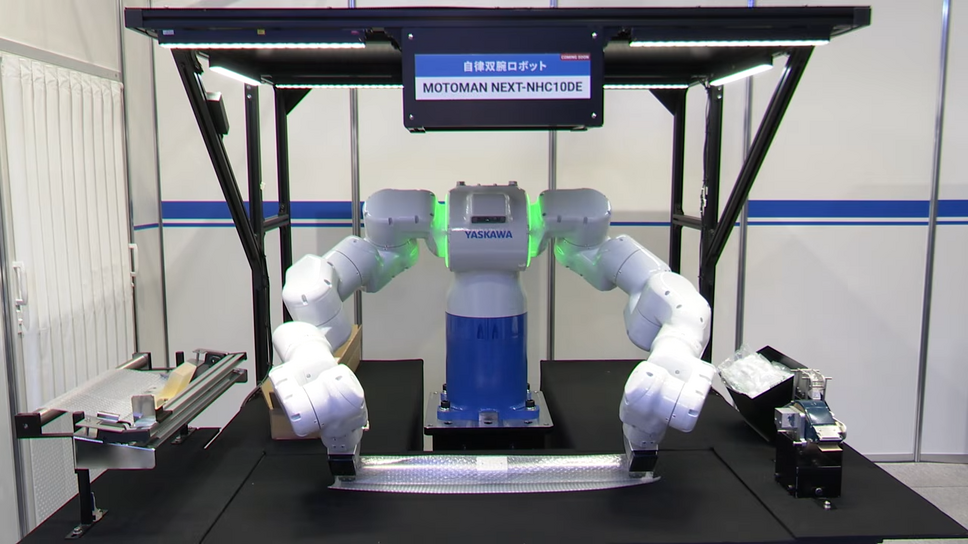
安川電機は、従来人手に依存していた梱包作業を自動化する双腕ロボットシステムを開発した。模倣学習と強化学習を組み合わせることで、ティーチングレスでの作業を実現する。
人と同じ作業環境で稼働可能
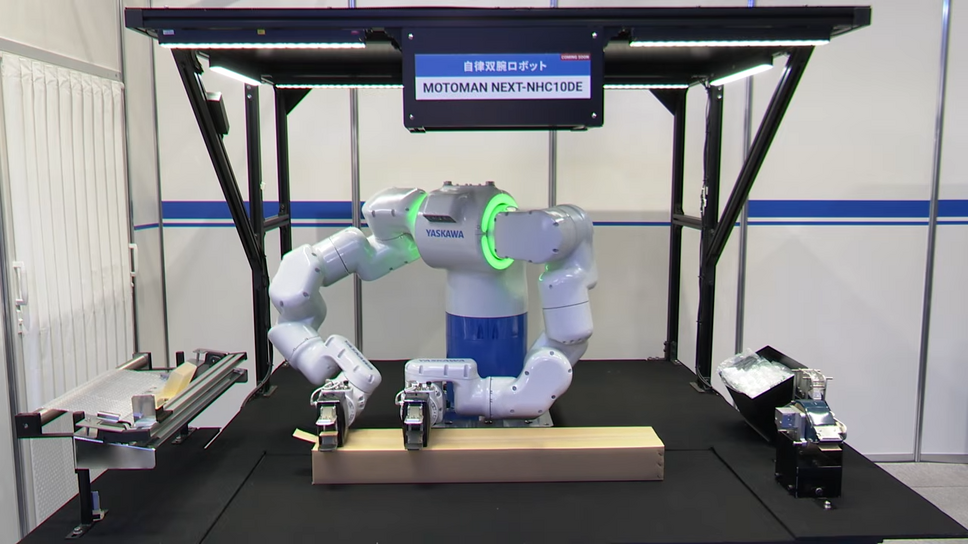
同システムでは、作業台に囲まれた小さなスペースの中で、ロボットが人と同じように作業を行う。作業台には人の作業環境と同様に部品と梱包材が置かれており、ロボットのための特別な仕掛けは不要だ。ロボットは自分の目で物の位置や状態を認識し、正しく持てたか、製品の重さを認識して運ぶ。このように作業の状況を認識する能力により、人と同じ環境で設備を大きく変えることなくロボットに置き換えることができる。
安川電機が双腕ロボットで梱包作業を自動化、模倣学習と強化学習でティーチングレス実現
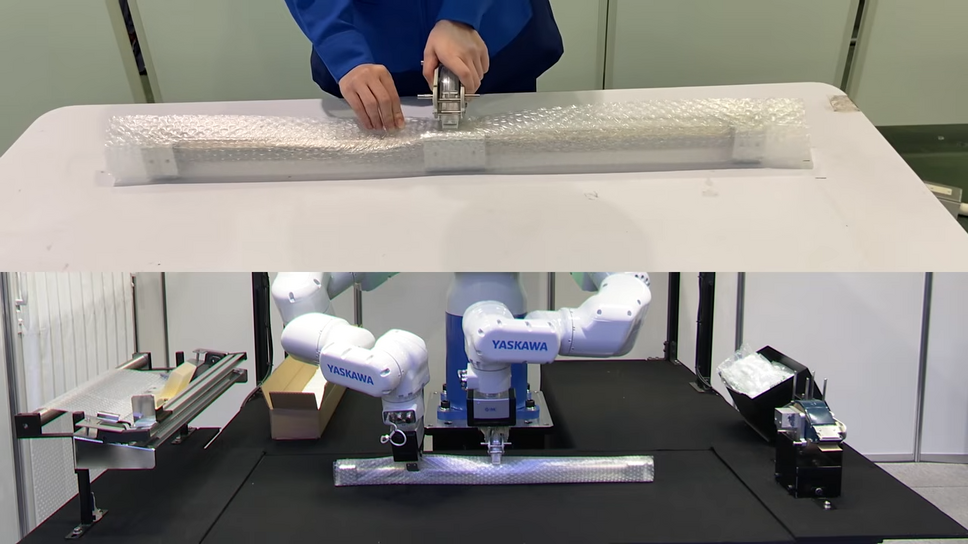
模倣学習で人の動きを再現
双腕ロボットは人と同等の自由度を持ち、人の動きを模倣することで滑らかな動作を実現している。部品の太い位置を掴む、手前に引いて巻くなど、人の経験に基づいて判断した動きをロボットの動きにそのまま反映できる。
この動きの生成は、双腕ロボットの操作経験のない人がこの作業のお手本の動作をしてみせることで、その人の意図を反映した動作を生成している。
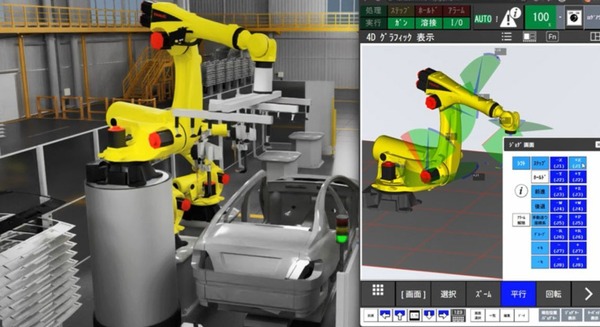
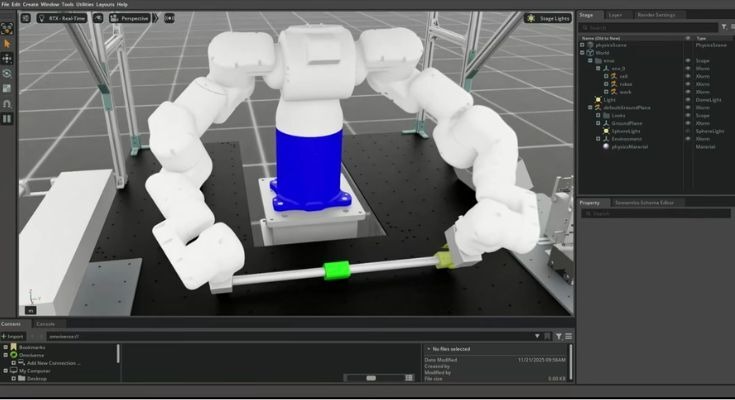
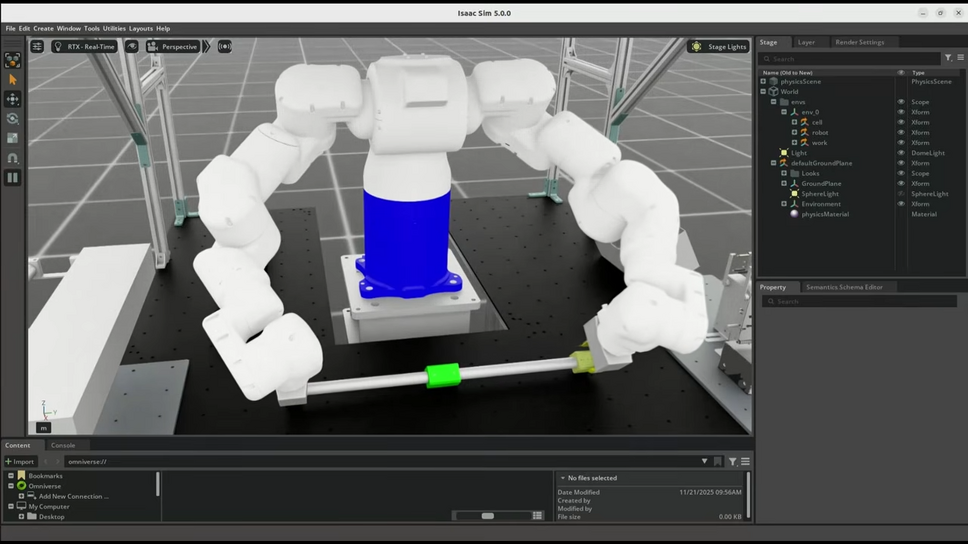
Isaac Simで強化学習を実施
NVIDIAが提供するロボティクス用3DシミュレーターであるIsaac Simを活用し、ロボット学習用のフレームワークであるIsaac Labを使用することで、模倣により生成した動作に対しロボットの学習を行う。さらに効率的な動作を生成したり、作業の完成度を高めたり、違う部品の梱包など作業範囲を拡大することが可能となる。
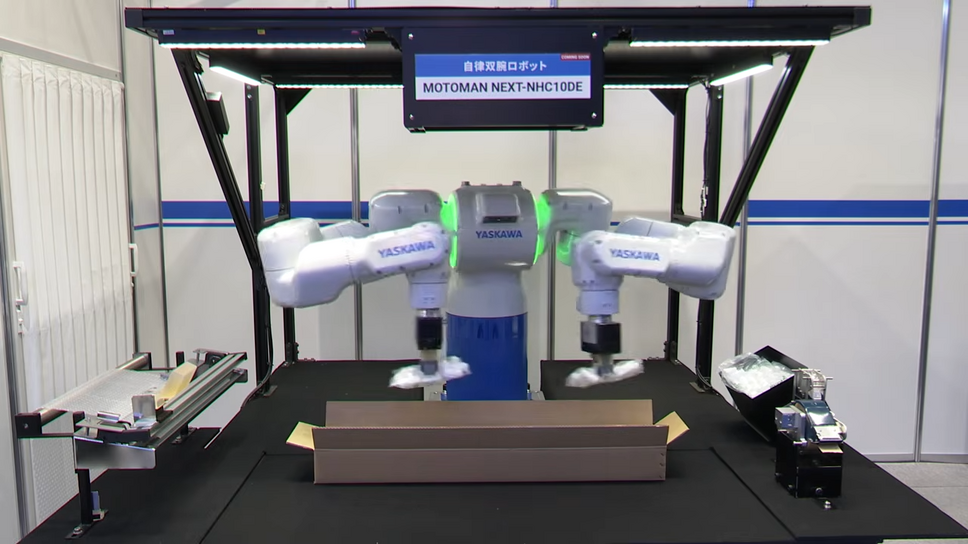
梱包作業の完全自動化を実現
梱包した部品を箱に入れて梱包作業を完成する。この動作は箱の位置や状態を見て、箱に当たらない動きを自らが作っている。
最後にクッション材をロボットが隙間に投入し、箱を両腕で閉める。人が使用するガムテープを人と同じように扱い、箱を閉じて作業は完了だ。
人手不足解消に貢献
以上のように、モートマンネクストの自律性、そしてそれをさらに磨かせる強化学習と双腕ロボットの柔軟性により、人手作業の自動化を可能にする。
なお、同社の公式YouTubeから、本ロボットが動いている映像も確認できる。