



自動運転サービス実証実験地域協議会は、自動運転サービスの事業化に向けた実証実験を行うことを発表した。実証実験は中山間地域におけるファースト/ラストマイルサービスとして、自動運転サービスが導入される際に必要となる技術やサービス内容など、事業化に向けた検証や検討を行うとしている。
自動運転サービス実証実験地域協議会には、KDDI総合研究所、パイオニア、ジョルダン、茨城交通らが参加しており、今回の実証実験では技術供与も行っている。また、みちのりホールディングスからも参加のブレスリリースが発表されている。
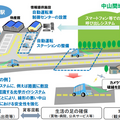
同協議会は、高齢化が進む中山間地域において人流・物流を確保するため、商業施設・休憩施設・地域振興施設等が一体となった「道の駅」等を拠点とし、自動運転サービスの社会実験・実装を目的に実証実験を行っている。この取り組みは、国土交通省が内閣府SIPの枠組みの中で、2017年度より行っている。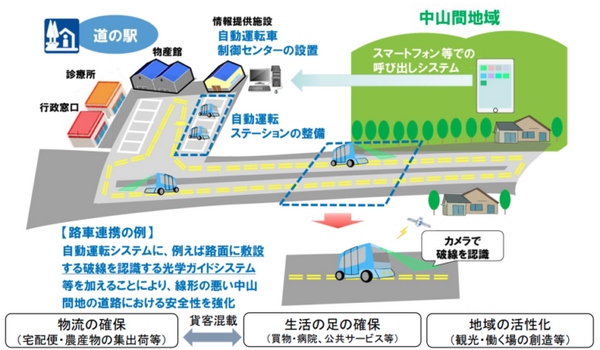
中山間地域は日本における地域区分のひとつで、山間地から平野にかけて傾斜が多く農業生産条件が不利な地域をいい、農林統計上用いられている地域区分のうち、中間農業地域と山間農業地域を合わせた地域を指す。山地の多い日本では、このような中山間地域が総土地面積の約7割を占めている。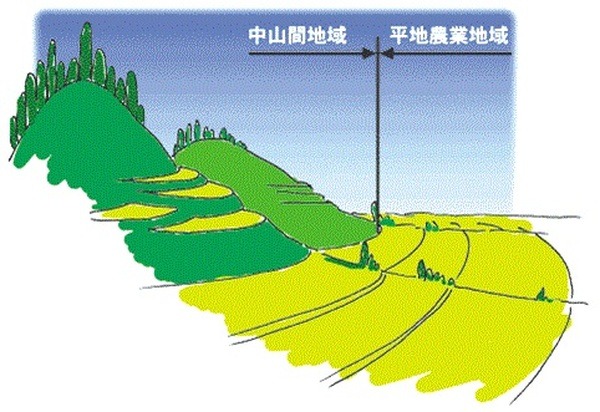
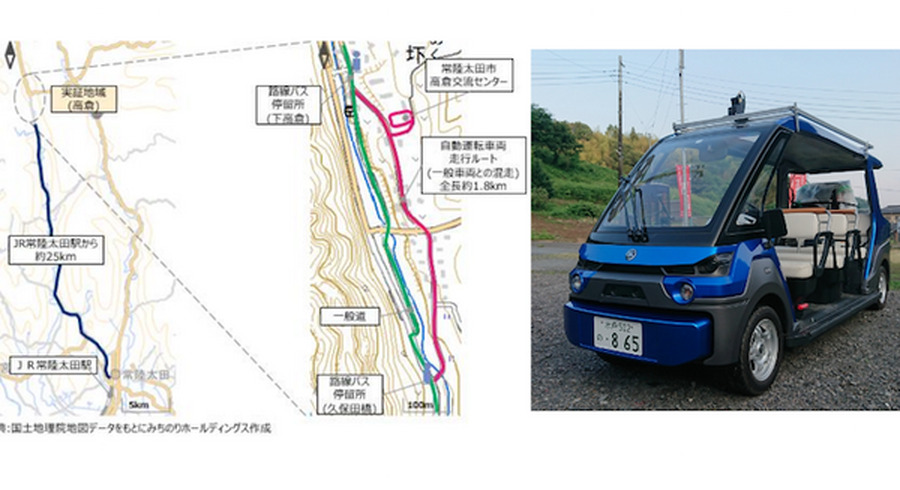
同実証実験では、ヤマハ発動機が提供する自動運転車両が、茨城県常陸太田市の高倉地域(走行距離約1.8km)を対象に8時~17時の時間帯に運行する。実験は昨日より開始しており、7月21日まで毎日行われる。
KDDI総合研究所とパイオニアは、走行に関するシステムを担当
自動運転レベル4以上は運転手が存在しないため運行状況を監視できるシステムと、障害物により自動走行が妨げられないよう車外環境の検知が極めて重要とされている。今回の実証実験では、KDDI総合研究所の通信技術を活かし、車両内外の映像を茨城交通側の運行監視センターに送信し、トラブル時には監視側と車両側で音声によるコミュニケーションが取れる手段を検証する。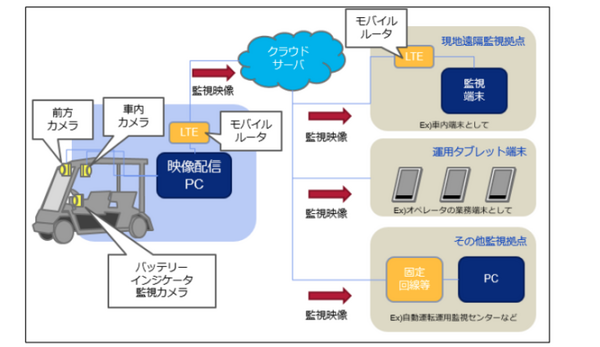
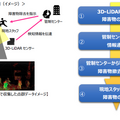
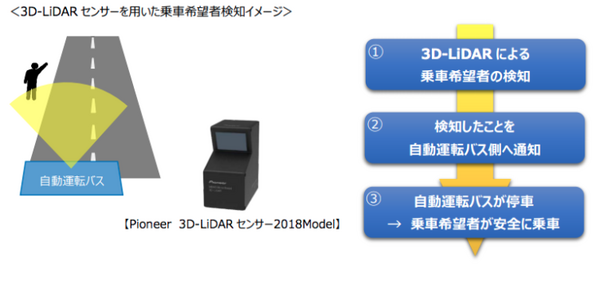
車外環境の検知は、自動運転車両の死角になる道路の路側に3D-LiDARセンサーを設置し、その情報を運行監視センターに通知。もし自動運転車が走行ルート上の樹木などの落下物、その他障害物を検知した場合は、除去するまでの一連の処理を実運用に近い状況で検証し、インフラ側からサービスを支えるための課題抽出を行う。さらに、車両側にも3D-LiDARセンサーを搭載し、走行ルート上の乗車希望者を検知する仕組みも検証するという。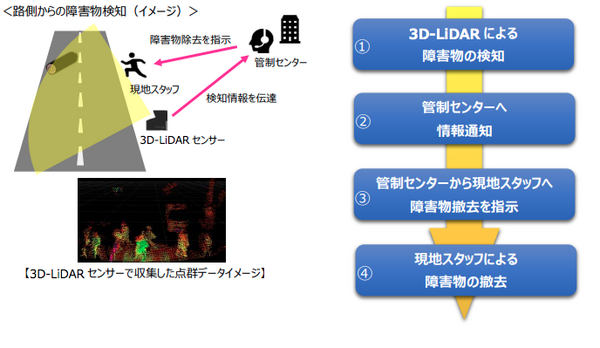
ジョルダンと茨城交通は、車両予約や点検システムを担当
ジョルダンは、交通モードとして自動運転車両が一般的となる社会を想定し、幅広い年齢層が活用できるよう操作性・視認性に配慮したUIをコンセプトとした車両予約システムを導入する。同システムはアプリによって提供され、住民が自ら自動運転車両の乗車予約を行う(実験期間中はアプリがインストールされているタブレットを地域内の住民に貸与)。また、乗降時の本人認証時には、NECの顔認証クラウドサービス「NeoFace Cloud GPS連携サービス」と連携する。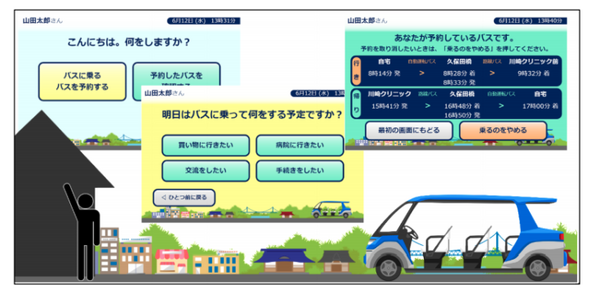
ジョルダンは他にも、独自の音響信号処理技術を用いた音声案内システムで、自動運転に有用な各種情報を取得することができるIoTシステムの検証と、茨城交通と協力して遠隔スタッフによる車両点検を行えるタブレット・システムを開発・提供する。
同協議会のロードマップでは、今年までに自動運転ビジネスの社会実装を行い、2020年から25年にかけて民間ベースでの自動運転ビジネスの展開を行うとしている。
新東名高速でソフトバンクがトラック隊列走行の5G実証実験 「5G-NR」で車間距離の自動制御に成功【世界初】
WILLERS、自動運転サービス商用化目指し3年間の実証実験へ 日本は今秋開始を目指す
中国EC大手・京東集団、レベル4の自動運転配送車を初披露 ラストワンマイルを実現へ
自動運転サービス実証実験地域協議会





