




2019年のCEATECが終了した。本誌でも既報のとおり、ANAホールディングスによるテレプレゼンスロボット活用「アバター」構想を目玉として、日立とソニーによるaiboとminimaru連携など、初お披露目を含む多数のロボットが出展されていた。
さて、昨年(2018年)のCEATECを覚えているだろうか。2018年のCEATECで最も話題を呼んだのは、注目のスタートアップ、株式会社Preferred Networks(プリファードネットワークス、以下 PFN)による「家庭用全自動お片づけロボット」だった。ハードウェアはトヨタ自動車の生活支援ロボットHSRを使い、PFN独自のソフトウェアで自動片付けを成功させ、CEATECではインダストリ/マーケット部門 準グランプリを受賞した。
■動画
そして代表取締役の西川徹氏はKeynoteで「すべての人にロボットを」と題して、パーソナルロボット市場への参入を高らかに講演した。
■動画
では今年、PFNは何を出展していたのか。2019年は、国内外のスタートアップ企業および海外諸機関のパビリオンを集めた「Co-Creation PARKエリア」で初日と最終日だけ、外観検査とビジョンピッキングのデモンストレーションをしていた。「お片づけロボット」ほど派手ではないが、昨年のCEATECの技術セミナーで発表され、うち一つは製品化されており、もう一つは製品化に向けて開発中のものだ。ここでレポートしておきたい。
初見の物体でも0.2秒で検出して掴む「PFN Picking Vision」

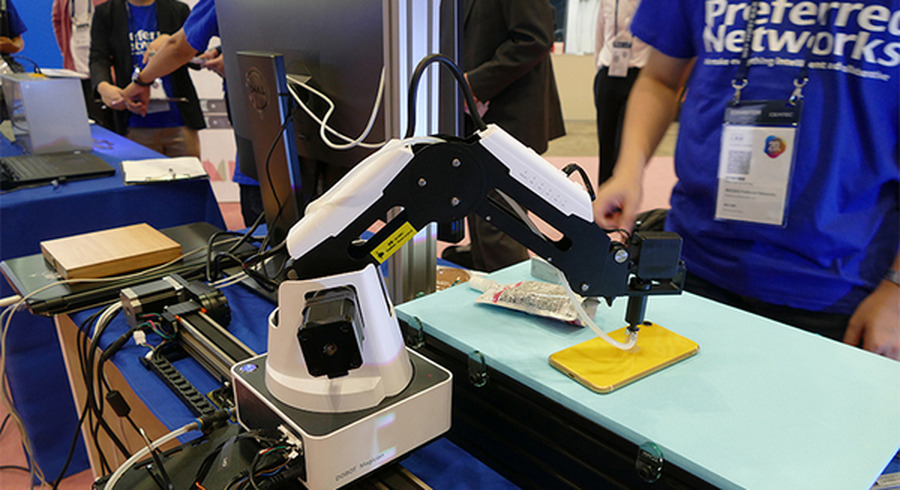
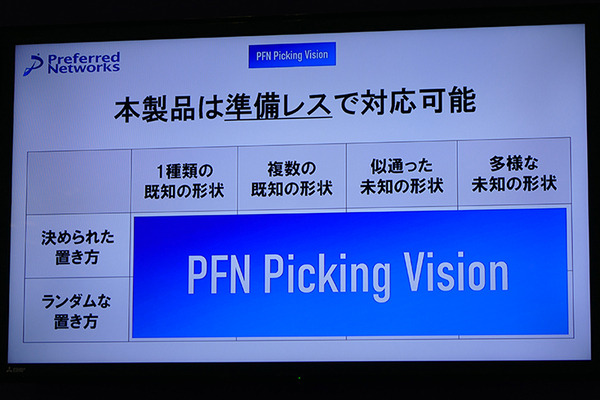
ピッキングロボット向けビジョンソフトウェア「PFN Picking Vision」は事前準備が少なくてすむ高速画像認識ライブラリ。従来システムでは普通は必要となる3次元CADモデルによる形状登録・識別箇所登録・把持点登録が不要で、学習済みのモデルを使って、バラバラに積まれた初見の物体も約0.2秒で検出できるという。
■動画
変形するパウチや、形状が決まっていない果物なども把持位置を検出してピックできる。ゆがみや汚れがあったり、向きが揃っていなかったり重なっていても把持できるかどうか判断できる。多種大量の商品の登録をする必要がないので初期開発コストを抑えられるだけでなく、新商品の追加登録の手間も省けるとしている。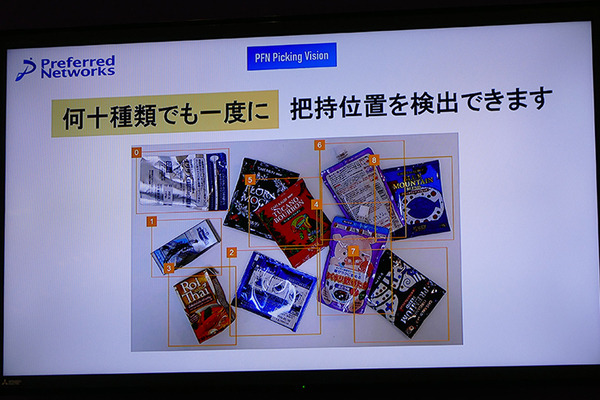
今回のデモではブース設置の都合上、産業用のロボットではなく、教材として用いられることの多いDOBOT Magicianを使っていた。ピッキング方法は吸引で、3DカメラはIDS Ensenso。デモを見ていると、たとえばパウチ飲料の口の部分と本体を別のものとして認識してしまうなど、本来は一つの物体であるものを二つの別のものと認識してしまうことはあるようだ。
■動画
わずか100枚のデータ画像で良品/不良品を分類「PFN Visual Inspection」

外観検査用ソフトウェア「PFN Visual Inspection(PVI)」は、少ないデータ数で良品/不良品を分類できるソフトウェアだ。工業製品のキズ、異物、あるいは布製品の汚れやほつれなどは、今でも人が目視で確認している。だが、ひたすら人が見るのはつらいし、教育コストも高い。また、検査基準がぶれたり属人化しがちという課題がある。それを自動化するためのソリューションである。
PVIは外観検査にディープラーニングを活用したものだが、学習データが少なくてよく、実装がすぐできる一方で検知性能が高いという。具体的には良品画像を100枚程度、不良品画像を20枚程度用意すればいい。少ないデータ枚数、數十分の学習時間でも高精度な判別ができる。エンジニアでなくても簡単に利用できるインターフェースも用意されている。
検知基準も調整可能だ。検知漏れを重視するのか、判定が難しいものは人にまかせるのかといった点を調整できる。1-10枚/秒程度のCPU版ライブラリは無償提供、最大100枚/秒を実現できる高速なGPU版もある。PFNからは学習ツールとライブラリが提供され、それをパートナー企業がシステム構築するといったかたちで2018年12月から提供されている。
■動画
今回の展示で面白かったのは事例紹介だ。奈良県の建築資材業の株式会社吉銘は、板材の「節」を検出するのにPVIを活用している。節といっても大きさなどが様々で熟練者でも良否判定は難しいのだという。PVIを使うことで基準がばらつきやすい欠陥を定量化してランクづけできるようになった。
工業製品のキズだけでなく、このような用途もあるとは思わなかった。アイデア次第でもっと活用法があるのかもしれない。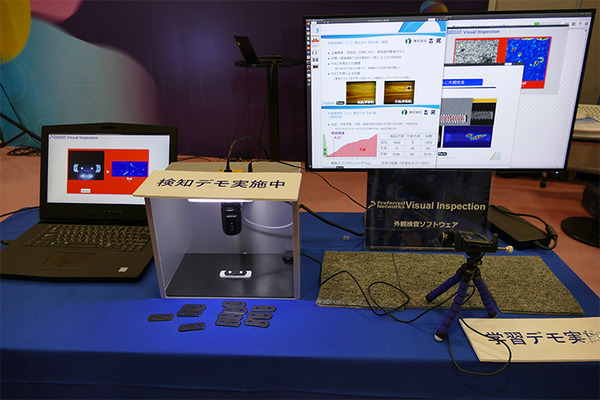
森山和道の「ロボットの見方」
株式会社Preferred Networks



