株式会社幸和製作所と国立研究開発法人産業技術総合研究所(産総研)ロボットイノベーション研究センターは2019年12月9日、共同で転倒防止機能を持つロボット歩行車を開発したと発表し、同日に行われた産総研の成果発表会で開発中の試作機を公開した。
転倒動作シミュレーションに基づいて設計されており、転倒の初動を抑制する機構を備えている。人体ダミーを用いた実験でも一度も倒れたことはないという。これにより、車椅子に「座らせきり」の介護を抑制することを狙う。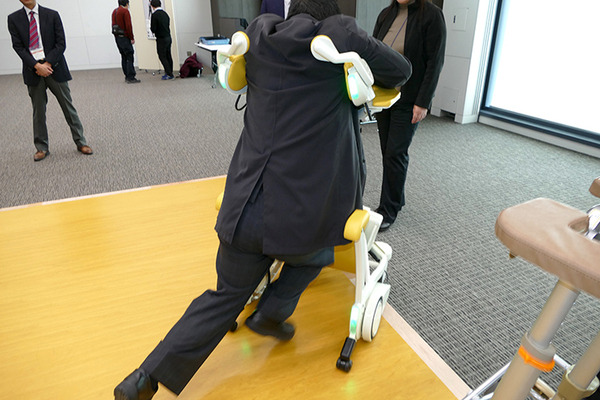
「作られた寝たきり」を防止する
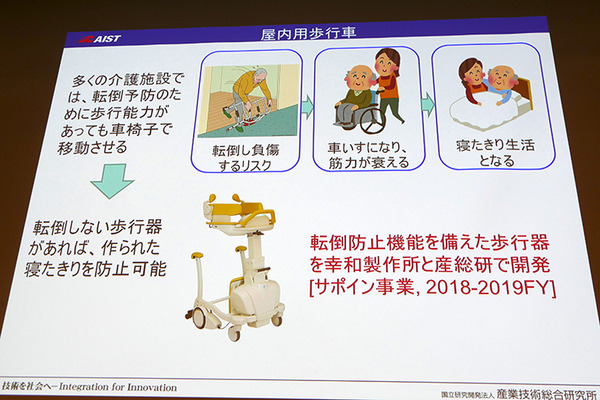
今回開発された「転倒防止ロボット歩行車」は屋内の歩行者の転倒を抑制するもの。高齢になり足元が覚束なるとふらふらして転倒しやすくなる。そのために補助として用いるのが歩行車だが、従来の歩行車には転倒防止の機能がない。歩行車を使っても高齢者が転倒してしまうリスクがあり、転倒した場合は施設側の責任になるため、多くの介護施設では歩行能力があっても車椅子に座らせてしまって、施設内を移動させることが多い。歩行しなくなった結果、廃用症候群によって筋力が衰えてしまい、施設に入ると寝たきりになってしまうことが少なくない。
そこで「車椅子と同等程度の介護の負担で運用でき、かつ転倒しない歩行器があればいいのではないかと考えて、今回の開発に至った」と産総研ロボットイノベーション研究センターセンター長の比留川博久氏は開発の経緯を紹介した。
■動画
座らせきりゼロを目指す転倒防止歩行車

開発の内容については株式会社幸和製作所 執行役員 開発本部長の戸塚健一氏が紹介した。幸和製作所は1965年創業、大阪・堺に本社を置く福祉用具・介護用品の総合メーカー。高齢者向けのシルバーカーを国内で初めて開発し、現在もトップシェアを持っている。また通常の歩行車でもマーケットシェア・トップ。2015年にはロボット歩行車「リトルキーパス」を発売し、こちらは介護保険のレンタル対象品目にもなっている。
今回のプロジェクトは幸和製作所が2017年に厚生労働省の平成29年度介護ロボットのニーズ・シーズ連携協調協議会設置事業を受託したことからスタート。介護施設の実態調査を行なったところ、2日に一回くらいの頻度で転倒に関するヒヤリハット事例が発生しており、週に一回くらいには実際に転倒が起きていることがわかったという。そこで本格的に転倒防止ロボットについて研究開発を進めて来た。今回のロボットの開発自体はは、戦略的基盤技術高度化支援事業の補助事業「座らせきり介護ゼロを目指す自立支援型転倒防止ロボット歩行車の研究開発(2018~2019年度)」による支援を受けて行なった。このあと、介護施設で実証・評価して事業そのものは終了となるが、その後、独自に実用化を目指す。
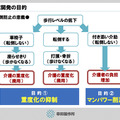
目的は前述のように、歩行レベルの低下・座らせきりを防ぐこと。歩行レベルが低下すると転倒しやすくなり、転倒すると打撲骨折で動けなくなり、介護の重度化が起こる。事故防止するために付き添いを行うためには人手が必要になる。そこで「重度化の抑制とマンパワー削減を目指した」という。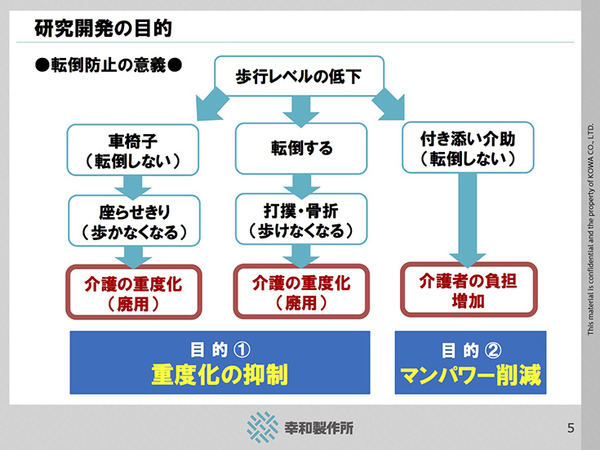
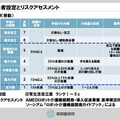
対象者は日常生活動作を測る指標であるFIM(Functional Independence Measure)スケールを用いて想定し、15m-50m程度歩ける人とした。7段階ある認知症高齢者の日常生活自立度においてはランクI~IIa(ほぼ自立している、多少困難があっても周囲が注意していれば自立している)とした。リスクアセスメントは、産総研の研究成果の一つである、AMEDロボット介護機器開発・導入促進事業基準策定評価コンソーシアム 「ロボット介護機器開発ガイドブック」 に基づいた。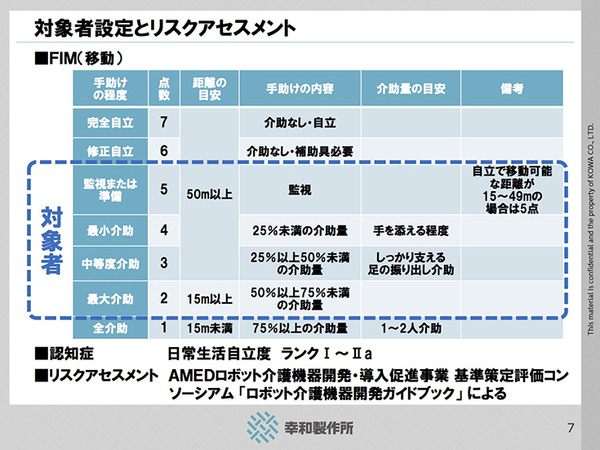
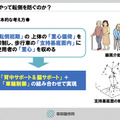
背中+脇のサポートに車輪制御を加えて転倒を防ぐ
開発した転倒防止ロボット歩行車は、脇サポートと背中サポートで体幹を保持するかたちで、移動用の車輪は左右3輪ずつの計6輪。中央に駆動輪があり、残りの4つは受動車輪。駆動輪は左右それぞれが独立に駆動し、その場旋回も可能。基本的に本質安全の考え方で設計されていて、人が脱力してもたれかかっても倒れない安定性を保っており、そこにロボット技術で歩行サポートする考え方となっている。
パワーアシスト機能もあり、車輪の速度を検知してトルク制御することで歩行を助ける。歩行アシストの強度はユーザーが自由に設定できるが、基本的に職員が操作する想定となっている。また床面傾斜検知によって左右軸のバランスをとる。後ろ向きにも自由に進めると同時に、倒れないようになっている。また、歩行が不安定な人向けに、左右のバランス設定も可能だ。
ハーネス等を使っていないので生活動作が自由に行いやすい点も利点となっている。駆動輪の設計・パワーアシストと、転倒防止機構は、幸和製作所が開発したもの。
産総研の「デジタルヒューマン」と33自由度のダミー人形で安全性を検証
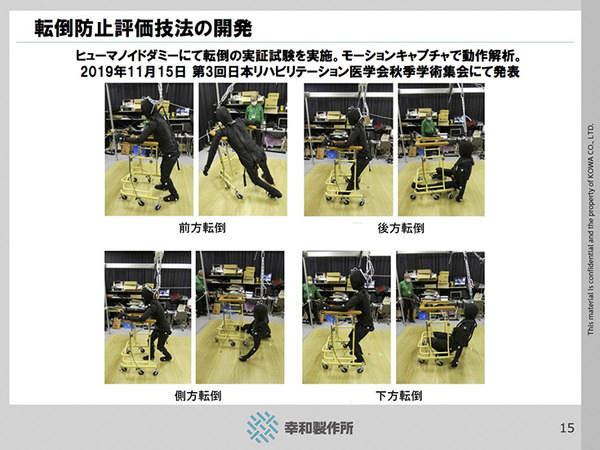
今回公開されたものはプロトタイプ2号機で製品版ではない。1号機の試験は横浜市総合リハビリテーションセンターで実施し、産総研が開発した33自由度を持つ人型ダミーを使って行なった。
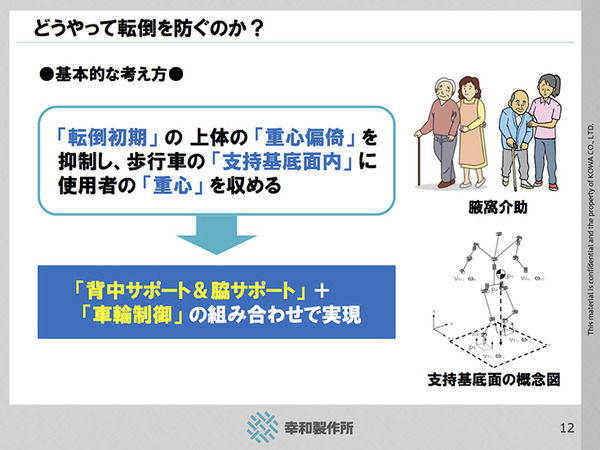
先行研究により、転倒は6つのモードに分類できることが知られている。基本的に転倒は、上半身の姿勢が大きく変位しバランスを崩すことで起こる。転び始めに重心の変位を抑制し、支持基底面内に収めてしまうことができれば転倒を防ぐことができる。側方の転倒については車輪位置とのバランスを考慮して転倒を防いでいる。
実際の試験はやぐらを組んでダミーを吊り上げ、一気に放すことで転倒させた。ダミー人形の重量は58kgあるが、後方、下方、側方、いずれの方向に倒れた場合であっても人型ダミーが落下して転倒することがなかっただけでなく、歩行車ごと転倒するケースもなかったという。
また、合わせて産総研の「デジタルヒューマン」を使って力学シミュレーションによる検証を行っている。
2021年2月実用化を目指す

今後は、製品としての安全性を評価するため、JIS T 9265:2012(福祉用具のなかでも歩行補助具としての歩行車に関する工業規格。ISO
11199-2,3に相当)に基づく静的安定性試験(傾斜面に設置して転倒するかどうか)、転倒事象再現装置による牽引試験などの実験を行う。並行して量産モデルの開発を行うために特別養護老人ホームや有料老人ホームと協力して実証試験を行い、2021年2月までに実用化することを目指す。
また用途については日常使いと歩行訓練用途の両側面で考えており、リハビリ用途としても使えると考えているという。現時点では家庭用ではなくあくまで介護施設での利用を前提としている。販売予定金額は未定。売り切りになるか、リースになるかといった販売形態も検討中とのこと。