







人間と親和的に対話することができる自律型ロボットの実現に向けた研究を行っている「JST ERATO 石黒共生ヒューマンロボットインタラクションプロジェクト」は、8月6日に第四回めとなるシンポジウムをオンラインで開催した。
多数のセンサー情報を統合して認識し、視線やジェスチャなども活用して表現を行うアンドロイドのためのマルチモーダル対話制御システムや、複数のロボットによる会話の効果、人間どうしが行うような長く深い音声対話など、このプロジェクトの研究内容や成果等が発表された。
いずれも今後のヒューマノイドやコミュニケーションロボット、人とロボットとの共生に関わる興味深い内容だった。
■ JST ERATO ISHIGURO Symbiotic Human-Robot Interaction Project (約13分)
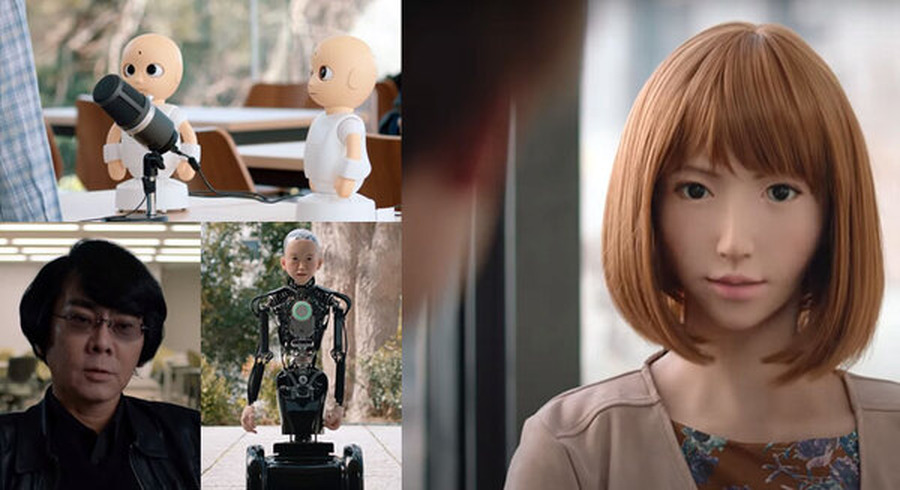
このプロジェクトを含めて、石黒教授ら研究チームはこれまで様々なヒューマノイド型ロボットを開発し、技術研究を進めてきた。読者の記憶に鮮明に刻まれているロボットも多いことだろう。
ERICA
代表的なヒューマノイド型ロボットのひとつが「ERICA」(エリカ)。デザイン的にはアニメーションのキャラクターデザイン技術も取り入れ、人間以上に美しく見える顔を持つエリカは、このプロジェクトでは人との会話の研究に活用されている。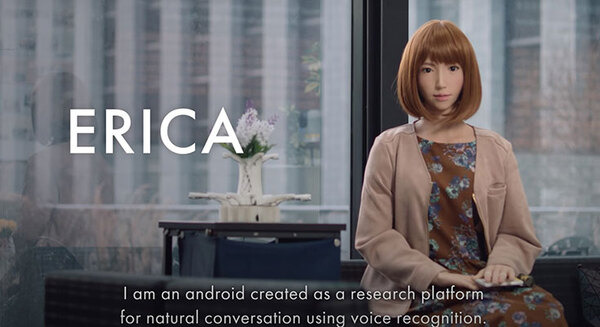
ひと言でいうと、人間どうしが日常的に行っているような、長く深い音声対話の研究だ。音声対話を手段でなく、雑談でもなく、「それ自体が明確な目的を有したもの」として捉え、アンドロイドに適した具体的で社会的なユースケースを想定してみる。例えば、傾聴・就職面接・研究紹介・お見合いなどにおいて、対話コーパスを収集、システムを構築していく。
京都大学の河原達也教授や井上昂治助教が中心になって研究している。
CommU
デスクトップサイズの「CommU」(コミュー)は、人間が複数体のロボットと会話することによる効果や影響を研究するのに絶好のロボットだ。シンポジウムでは大阪大学の吉川 雄一郎准教授が複数体連携させることで人との対話継続を図る対話システムを紹介。日本未来館や高齢者施設等で実施した実証実験を紹介しながら、これらの対話感の評価や成果について報告した。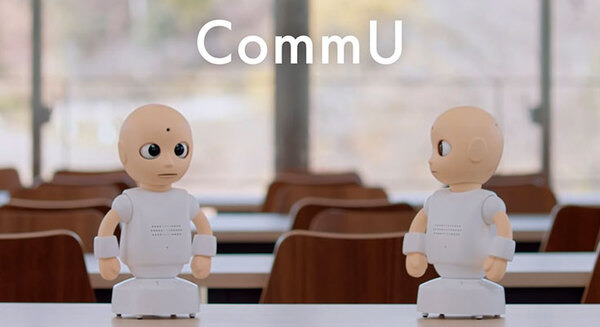
ibuki
子どもの顔を持つ身長約120cmの「ibuki」(イブキ)は車輪で移動する機構を持つ。遠隔でも自律でも移動できる。子どものデザインが採用されていることには大きな意味がある。多くの人は「子どもを守ってあげたい、手を差し伸べたい」という感情を持っている。ibukiは周囲の人に助けを求めながら社会の中でどう振る舞うか、という研究に使われている。
シンポジウムでは、移動中の全身動作による感情表出、敵対的生成ネットワーク(GAN)を用いた人間らしい動作の自動生成、人と手つなぐことで実現されるインタラクションなどが、大阪大学の仲田佳弘助教より発表された。
アンドロイドU
「アンドロイドU」を記憶している読者も多いだろう。もともとはパルコと大阪大学 石黒研究室、ドワンゴによる共同企画として、世界初となるアンドロイドをアイドルに育てる「アンドロイドル『U』育成プロジェクト」として開発された。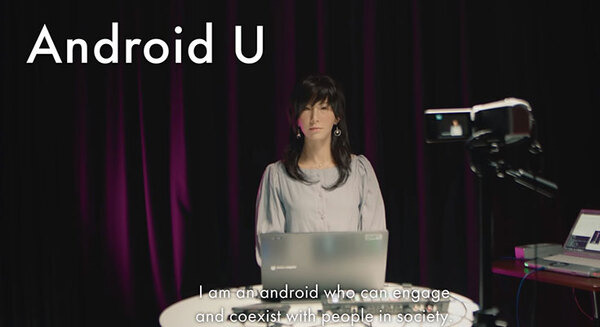
「ニコニコ生放送」を通じてユーザーとの様々なインタラクティブな企画を提供し、スムーズで自律的な対話システムの構築の研究が行われ、このプロジェクトでは、「機械人間オルタ」の研究開発でも知られる名古屋大学の小川浩平氏が中心に、人間の会話の本質に関わる研究が行われている。
人間型のヒューマノイドロボットの進化と必要性
シンポジウムは「JST ERATO 石黒共生ヒューマンロボットインタラクションプロジェクト」の研究の経過報告や成果発表のために毎年行われているが、今年はコロナ禍で延期になっていた。
このプロジェクトは今年3月で一旦終了し、1年間の特別延長期間に入った。今回はプロジェクトとして最後のシンポジウムとなる。そうしたこともあって2019年度の研究成果の発表の前に、石黒教授からプロジェクトの概要とこれまでの研究成果の総括が紹介された。
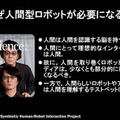
人型ロボットは必要か?
石黒教授と言えば、人間そっくりなアンドロイドに代表される「人間型のヒューマノイドロボット」だ。石黒教授はその形態にこだわる理由として「人間は人間を認識する能力を持っていて、人間にとって理想的なインタフェースは人間」と常々語っています。また、人間型のヒューマノイドを研究することで、「人間とは何か、生命とは何か、意識とは何か」を解き明かしていく、人間そのものを理解するための研究、とも言っている。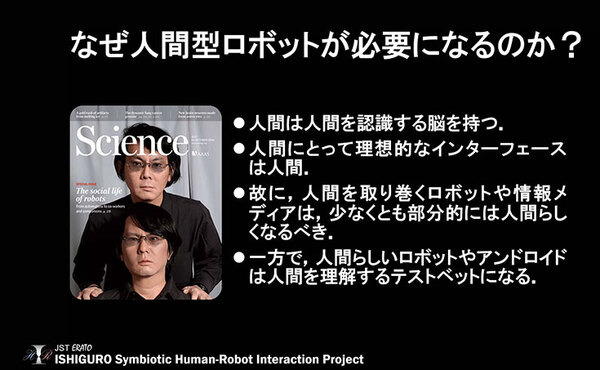
石黒氏は「これまで人とロボットの会話やコミュニケーション、ふるまいについて要素技術の開発が盛んにおこなわれてきた。今後は、このERATOのプロジェクトを含めて、知能とは何か、身体性とは何か、マルチモーダルな情報をどう扱うのか、欲求をどのようにロボットに実装すべきか、そこから意識を感じることがあるのか、意識を感じることができれば人間とどのような社会関係性が築けるのか、など、メタレベル、マクロレベルの人間やロボットの高度な認知機能への研究開発が重要になっていくだろう」と語った。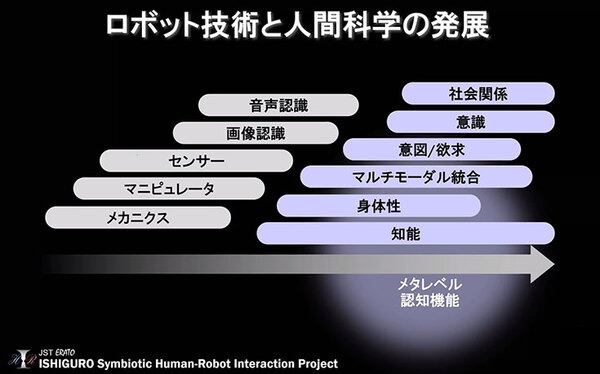
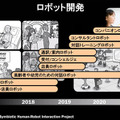
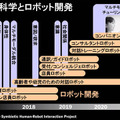
石黒教授が描くロボット開発のロードマップ
その上で、石黒教授が描くロボット開発のロードマップを示した。語学教師やレストランの店員を支援するロボット、高齢者や幼児の支援、店員/受付/通訳/案内等と進化していき、将来は比較的できることが幅広く汎用的なコンパニオンロボットをひとつのゴールに掲げた。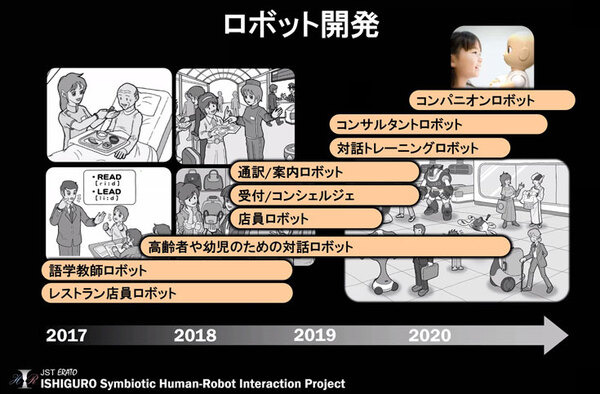
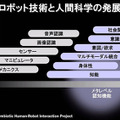
ロボットの進化に科学を重ねた図が下記。知能や身体性、マルチモーダルの統合など、少なくともこれら科学技術を念頭にして、これまで課題に着手、研究を積み上げてきた。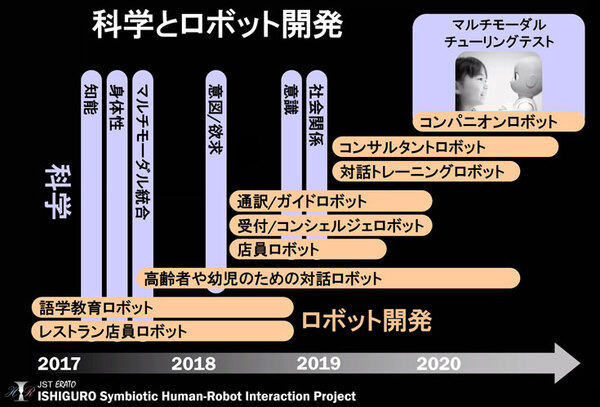
マルチモーダル・チューリング・テストをパスするロボットの開発
今後の目標として「マルチモーダル・チューリング・テストをパスできるロボットを実現したい」とした。ここでいう「マルチモーダル・チューリング・テスト」とは、人間に操作された(遠隔)ロボットと、コンピュータに制御された(自律)ロボットとの比較を意味する。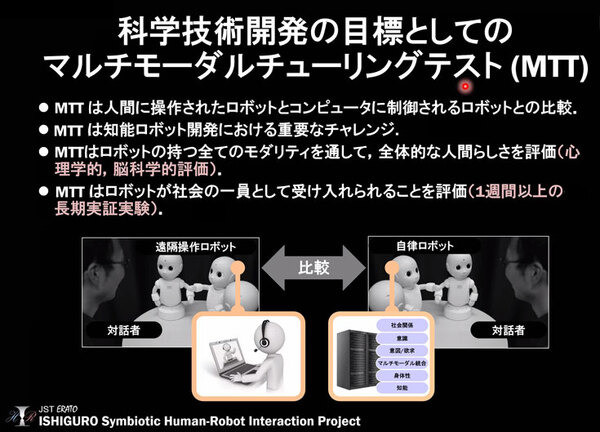
石黒氏はこれを「知的システムのための構成的アプローチ」ととらえ、「人間の”知能や意識とは何か”は、まだ解明させていないが、実際に工学的なアプローチでロボットを開発してみると、それが人間らしく感じたり、意識を持っているかのように感じられる可能性がある」と語った。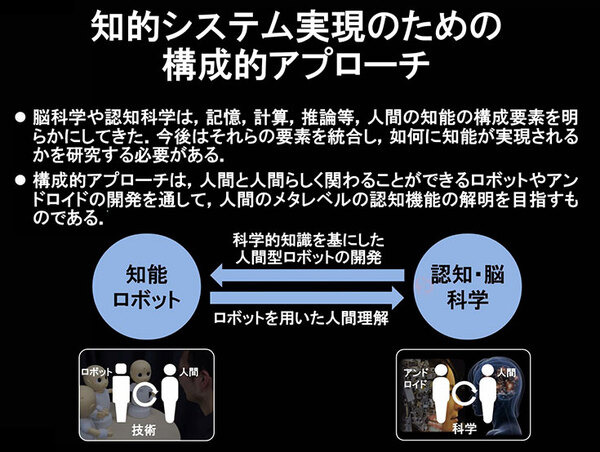
実際にこの日のシンポジウムでも後半に、アンドロイド「ERICA」を使って、自律で会話するロボットと、人間が遠隔で会話を行うロボットの環境下を比較して、ロボットと会話する人間がどのような印象を感じ、受け止め方をするかの実験結果が紹介された。
ロボスタでは引き続き、このシンポジウムやプロジェクトの発表内容を紹介していきたい。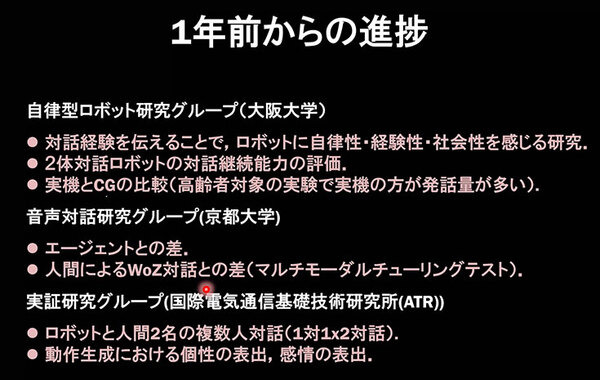
石黒浩研究室 関連記事 (ロボスタ)