






広島県を中心とする中国・四国地域の製造業、生産性向上を期すサービス業との技術商談の場として企画された「第4回 ひろしまAI・IoT進化型ロボット展示会」が2020年12月10日、11日の日程で広島県立産業会館で開催された。主催はひろしまAI・IoT進化型ロボット展示会実行委員会で、共催が公益財団法人ひろしま産業振興機構と日刊工業新聞社。
併催イベントとして講演会も行われ、12月10日には基調講演として「産業用ロボットの基礎技術研究基盤強化に向けたROBOCIPのミッション」と題して、技術研究組合 産業用ロボット次世代基礎技術研究機構(ROBOCIP:ロボシップ)理事長の榊原伸介氏が講演した。
産業用ロボット次世代基礎技術研究機構(ROBOCIP)とは、産業用ロボットメーカー6社が技術研究組合を通じて課題を持ち寄り、産学の知見を結集して未解明な領域や1社単独では難しいリスクの高い研究内容に取り組むことを目的に設立された機関。
ロボット分野に関わる人材の拡大や研究の裾野を広げ、5~10年後を見据えた「種まき」の場として技術革新や普及障壁の引き下げにつなげることを計画している。また、参加企業が抱える共通課題から研究内容を選定し、東京大学や東京工業大学などと共同研究するかたちで展開し、研究成果を各社に持ち帰り、応用研究や独自の製品開発など実用化への流れを生み出すことを目指している。
講演では、日本の産業用ロボットの国際競争力および産業用ロボットの技術的課題を踏まえ、ROBOCIP設立の背景から、フォーカスしている「モノのハンドリング及び汎用動作計画に関する研究」「遠隔制御技術に関する研究」「ロボット新素材とセンサ応用技術に関する研究」の取り組み内容、研究成果の実用化までの流れが紹介された。
伸びる中国、置いていかれつつある日本

榊原氏は初めに産業用ロボット市場の全体の流れを紹介した。国際ロボット連盟(IFR)の「World Robotics 2020」によれば、産業用ロボットの年間の出荷台数状況は特にアジア、中国での伸びが際立っている。それに比べると米国欧州の伸びはそれほどでもない。分野はやはり自動車、自動車部品、電機関連が多い。
■ 動画
実際に稼働しているロボットの台数ベースで見ても、一番使われているのは783万台で中国。2番目の日本の倍以上使われている。ほんの数年前までは日本が第一位だった。日本は長らく世界一のロボット大国と言われていたが、あっという間に差をつけられたかたちだ。日本の次は韓国、アメリカ、ドイツと続く。これらが産業用ロボットの主要市場だ。
ではどんな作業に具体的に使われているのか。ハンドリング、パッキング、溶接、塗装、研磨、加工機への部品の着脱(ローディング/アンローディング)、シーリング、グライディング、マテリアルハンドリングなど製造業の様々な分野でロボットが使われている。最近はこれ以外に、化粧品・薬品・食品などにもロボットの適用が広がっている。
産学連携で基礎・応用研究を実施する体制の構築を目指す
ROBOCIPの設立の経緯は以下のとおり。2019年5月から、経済産業省、関係省庁や有識者からなる「ロボットによる社会変革推進会議」が開催された。同年7月にとりまとめられた「ロボットによる社会変革推進計画」では、4つの柱が示された。その1つとして、「中長期的課題に対応する研究開発体制の構築」が示された。「産業界が協調し、産学連携して基礎・応用研究を実施する体制構築が必要」との方向性が提示された。
こうした国の政策の方向性に加えて、産業界としても、国内産業用ロボットメーカーの研究開発は各社で閉じており、これまでは協調していなかった。大学との産学連携についても十分とは言えない状態だった。これらの問題意識から、産業界が協調し、産学連携して基礎・応用研究を実施する体制の実現に向けて、検討を重ねてきた。そして、2020年7月10日、ロボットメーカー6社(川崎重工業、デンソー、ファナック、不二越、三菱電機、安川電機)で立ち上がった。その後さらに、セイコーエプソン、ダイヘンが加わって、現在8社から構成されている。
研究期間は2020年~2024年の5年間。目的は産業用ロボット基礎研究基盤強化および日本の大学の強化。研究体制は、組合から大学・研究機関へ研究委託(現在10大学)。共同研究成果の特許、ソフトウェア等の知的財産は組合員は自由に使用可能で、組合員以外にも有償/無償で公開予定となっている。
背景はこうだ。自動車産業や電機エレクトロニクスのほか、食品加工や物流でのロボットの活用は増えている。昨今は協働ロボットのように人と一緒にロボットが働ける環境も整いつつある。従来のロボットは人と共存できないために必ず安全柵が必要だった。それに対して協働ロボットではセンサーによって人と同じ空間で一緒に作業ができる。万一人が触れてもロボットが停止する機能がある。これらの特徴によって協働ロボットの出荷台数は、いま急速に伸びている。
従来のロボットはティーチングペンダントで動作を教示していた。大企業であれば専任オペレーターがいたのでそれで問題はなかった。しかし物流や、中小企業で広く用いられるためには、操作を大幅に簡便にしなければならない。実際に、人の使いやすさを念頭においたロボットが増えてきている。榊原氏は「ロボットはロボット、人は人ではなく、ロボットと人が協働する社会が広がって行くのではないかと考えている」と語った。
だが「人-ロボット共存社会」の実現のためには技術的に達成しなければならない課題がある。しかし、メーカー各社がバラバラに研究するようでは効率が悪い。そこでライバル同士であってもまだ達成されていない基礎研究領域ならば共存できるのではないかと考えて、ROBOCIPの設立に至ったという。
8社が11の大学・研究機関と連携
ROBOCIPの研究テーマは以下の3つである。
・モノのハンドリング及び汎用動作計画(ロボットの自動運転)
・遠隔制御技術に関する研究
・ロボット新素材とセンサ応用技術に関する研究
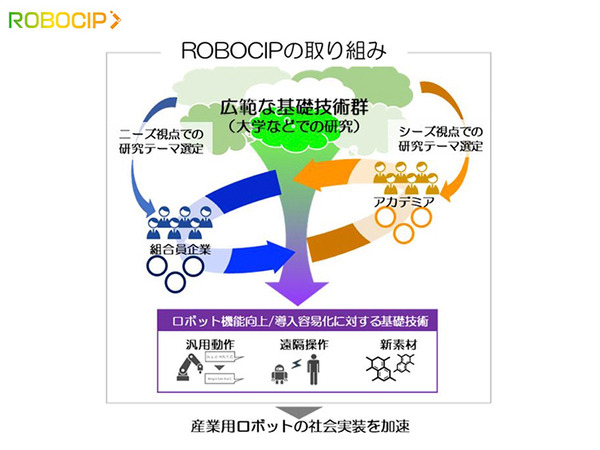
各項目において、各メーカーは自社に持ち帰って、競争力ある製品をつくっていく。これはSDGsの一つである「産業と技術革新の基盤を作る」にもマッチしている。メーカー・ユーザーのニーズとアカデミアのシーズをマッチングさせて、問題解決手段の方向付けをするのがROBOCIPの役割だと考えているという。
7月10日に設立後、新エネルギー・産業技術総合開発機構(NEDO)の「革新的ロボット研究開発基盤構築事業」に応募。これによって一年あたり2.5億円が ROBOCIPを含む3つのチームにあてられている。これに加えて各社が賦課金を出し合っていく予定。榊原氏は「ロボットで開発費のなかで一番コストがかさむのは実際にロボットを作ったり鋳物の型を作ったりするところ。基礎研究ということであれば、それほど費用はかからない。ソフトウェア、遠隔制御、新素材についてもそれほど予算が足らないということはない。これで5年続くので十分な成果が出せると期待している」と語った。
体制としては理事会が全体を統括し、その下に実際に業務を行う各部署があり、プロジェクトごとに各大学と共同研究を行う。大学は産総研を含めて11ある。具体的には以下のとおり。
・大阪大学 原田教授
・岡山大学 西教授
・慶應義塾大学 清木教授
・神戸大学 横小路教授
・筑波大学 相山教授
・東京大学 太田教授
・東京工業大学 遠藤准教授
・名古屋大学 片山教授
・名古屋大学石川特任教授
・山形大学 時任教授
・産総研 谷川センター長
それぞれの大学と密にディスカッションをしながら研究を進めているという。
ハンドリングおよび汎用動作計画 ロボットの自動運転化
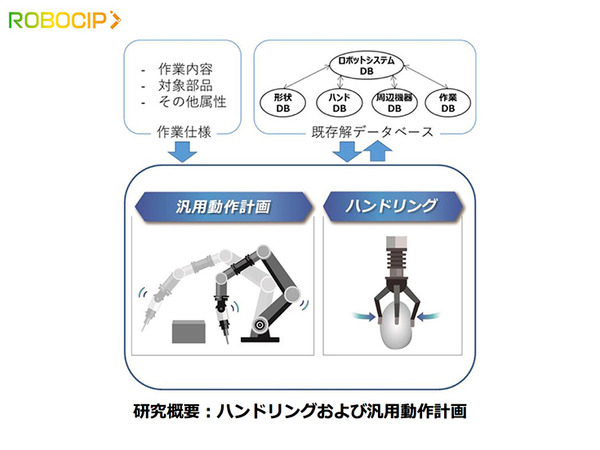
3つの研究についても簡単に紹介された。まず、「ハンドリングおよび汎用動作計画」とは、教示作業レスである。現状のロボットは動作をティーチングペンダントでいちいち教えなければならない。大きなワークの溶接であれば、それだけで何日もかかることがあるし、トラブルがあるとゼロからやり直す必要があることもある。非常に手間がかかる。
それに対し、目的地を指定すればそこへ行ってくれる自動運転のように、ロボットが自律的に作業を行えるようにすることを目指す。ロボットは対象物を認識し、それが何の商品で、何をするべきかを理解する。自分が何をしているのかを理解した上で作業する時代を目指す。人は細かいティーチングをするのではなく、それをここへ動かせといった作業指示をすれば、細かい動作経路などはロボットが自動で生成する。
このような世界を実現するためには、ロボットが扱うものに対するデータ、ハンドに関するデータ、ロボットシステムに関するデータなど、大きなデータベースが必要となる。自動運転にしても車が走る地図データは必要となっていて、いま整備されつつある。データのなかにも「ぶつかってはいけない」といった指示をデータ側、物体側から発信する。いわゆるアフォーダンスである。環境も含めた大きなデータベースを作ることが一つの大きな目標だ。
熟練作業のノウハウやスキルもデータ化する。単なるデータではなく、意味付けもしてデータ間のリンクも張る。ここには機械学習技術の知見も取り入れる。人が指示しなくてもロボットが自動作業する世界を目指す。
世界には多種多様な物品がある。今までのロボットは何をつかんでいるかは全く関係がなく動かしているだけだ。だが5年先には自分が何がつかんでいるかわかって行動するロボットの実現を目指す。
遠隔制御技術
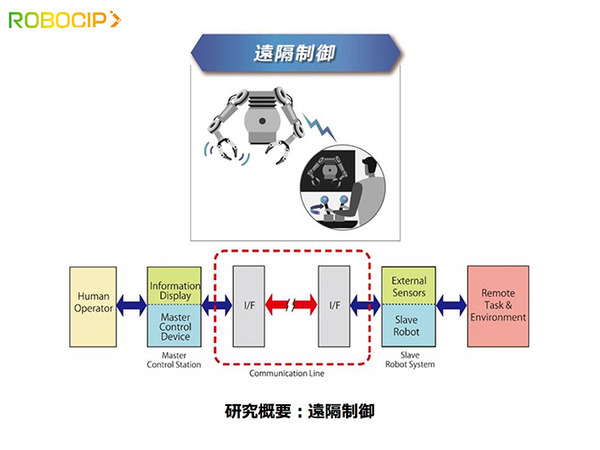
「遠隔制御」は、工場でのリモート作業だ。工場での作業もリモートのほうが望ましい。熟練作業者の数が減っているためだ。これまでは団塊世代が日本の熟練作業を支えていたが、いま急速に減っており、危機的状況になっている。リモートでロボットを動かせれば、限られた熟練者が複数台を扱えるようになる。通常は自動で動いているシステムに対し、熟練作業が必要なところだけ人が介入して作業を行うイメージだ。
通信速度は操作感覚に大きな影響を与える。数ミリ秒を切るくらいの応答性があれば柔軟な遠隔操作ができるようになる。5G、さらにその先の6G、7Gになればオペレーションが可能になるだろうと考え、遠隔操作の基礎研究を行なっていく。
VR技術も組み合わせ、あたかも現場にいるような感覚でリモートで作業できる時代が5年先、10年先には実現できるのではないかと考えているという。
ロボット新素材とセンサ応用技術
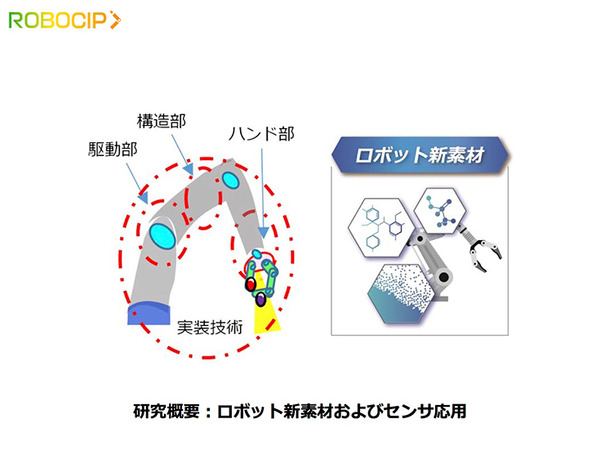
ロボット新素材は、いまのロボットは鉄、アルミでできている。重たい。動物は本体は軽いのに大きな力を出すことができる。いっぽう現状のロボットは、エネルギーの大半を、ワークではなく自分自身を動かすために使っている。CO2、電力を削減するためには、鉄やアルミから脱却し、非常に軽量だが強靭なアーム、ハンドを持つロボットが必要になる。
これまでの産業用ロボットは重たいものを正確に扱うことで成功してきた。だがこれからは人と共存する環境で活躍することになる。軽くて強靭な体はそのためにも必要だ。ネックとなるのはハンド。ハンドが進歩しないと器用な作業ができない。そのためには強くて軽くて力も出せるハンド、埋め込み式で耐久力があるセンサーなども必要となる。それらを開発することを目指す。「かなり野心的な試み。リスクも高い。こういったところこそ、この組合で基礎研究をするべき分野だと思っている」と語った。
ROBOCIPは各方面から期待されている。榊原氏は「反響から改めて基礎研究の重要性を認識している」と講演を締めくくった。






