
現在、自動運転の実用化に向けた取り組みが加速するなか、高精度測位の需要が高まっており、高速移動環境における高精度測位が可能になると、自動車や鉄道の自動運転で正確な車両位置を認識した制御を行えるようになる。また、線路・道路などの交通インフラを走行中に精密に点検できるようになることも期待されている。
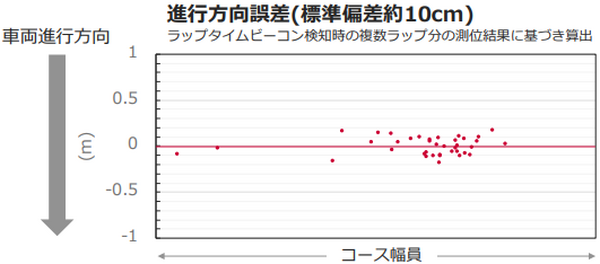
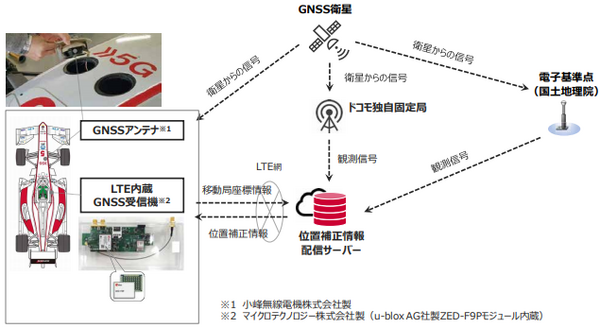
そのような中、株式会社NTTドコモは「docomo IoT高精度GNSS位置情報サービス 」(高精度GNSS:[Global Navigation Satellite System])を活用して、最高時速290kmで走行中のフォーミュラカーで、誤差約10cm の測位に成功した。高速走行中のフォーミュラカーを利用した高精度測位実証は国内初(2020年12月14日現在、ドコモ調べ)となる。
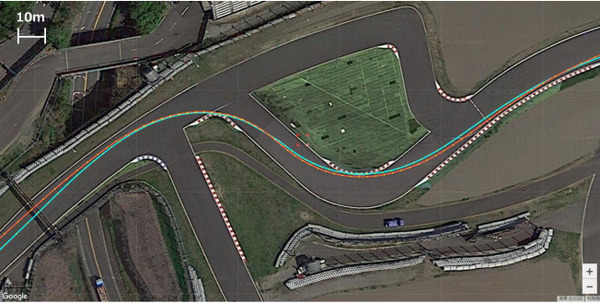
ここまで高精度になると、ドライバーによるコースどりの違いを可視化することができる。
今後、正確な車両位置の把握が必要となる自動車や鉄道の自動運転などで、高精度測位技術の活用をめざすとしている。
実証実験の概要
同実証実験は、2020年12月4日~6日に鈴鹿サーキットで開催された「2020年全日本スーパーフォーミュラ選手権 第5戦/第6戦 第19回JAF鈴鹿グランプリ」で、レーシングチーム「DOCOMO TEAM DANDELION RACING」および、日本電信電話株式会社と共同で実施した。
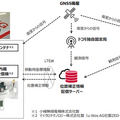
測位衛星システムGNSS(GPS、GLONASS、Galileo、準天頂衛星(QZSS)など衛星測位システムの総称 )を活用して誤差数センチメートルの位置補正情報を提供する高精度GNSSにLTE回線で接続した GNSS 受信機をフォーミュラカーに搭載し、レース走行中のフォーミュラカーをリアルタイムに高精度測位した。同実験の結果、サーキット内に設置されたラップタイム計測用ビーコン通過位置と高精度 GNSS 測位結果の比較により、約 10 cmの誤差での高精度測位が可能であると同時に、走行時間の 96%で高精度測位が可能であることも確認した。
同社は、今回の実証実験の結果を生かし、自動車・鉄道業界を含むさまざまな環境での安定した高精度 測位の実現に向けた検討を進めるとのことだ。
実証結果
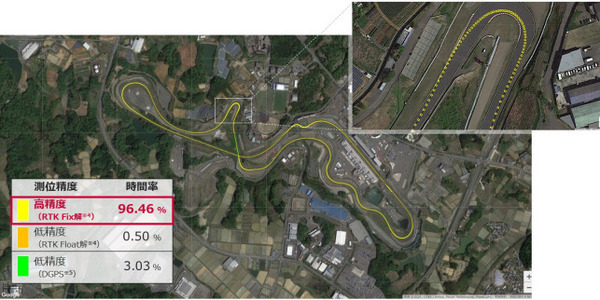
※4 RTKはReal-Time Kinematicの略で、複数のGNSS受信機と衛星との距離の差を搬送波の位相を使って測位する方法。Fix 解は解が収束した高精度な測位結果。Float解はFix解が得られるまでの途中解を用いた測位結果 ※5 Differential GPS の略で、複数の GNSS 受信機を用いて単独測位した位置情報から相対位置を求めて測位する方法
実証実験の詳細
レーシングチーム「DOCOMO TEAM DANDELION RACING」からのコメント
DOCOMO TEAM DANDELION RACING TEAM PRINCIPAL 村岡潔 氏
今まではレース後のドライバーのコメントなどから、エンジニアが走行状態を想像しマシンの設定や調整を していました。ドコモの高精度測位によりマシンの走行軌跡やスピードが可視化されることで、エンジニアの マシン設定や調整に非常に有効な技術になるかと思います。また、ドライバーごとにコース取りが違うため、 レース後にどちらのコース取りが良かったかなどドライバーへの気付きにもなると思います。 今後、モータースポーツでドライバーのリアルな走行軌跡をファンが体感できるなど、ファンサービスの向上 にもつながるとうれしいです。
https://www.nttdocomo.co.jp/biz/service/highprecision_gnss_positioning/
株式会社NTTドコモ(法人)