




株式会社アールティは教育研究向けアーム型ロボット「CRANE-X7」(クラインエックスセブン)が、一般社団法人日本機械学会より「2020 年度 日本機械学会優秀製品賞」を受賞したことを発表した。
日本機械学会優秀製品賞は社会的価値の高い優れた製品に光を当て、日本の産業基盤の更なる進化と発展を支援することを目的に、日本機械学会より創設された賞。機械あるいは機械システムに関連した製品が対象。教育研究向けアーム型ロボット「CRANE-X7」は関連する論文や販売実績などの客観的データを指標とし、それらを支える研究開発や生産現場に生かされた技術力に重点を置いた評価基準のもと、着実なる機械工学の基盤的なものとして評価された。
CRANE-X7 について
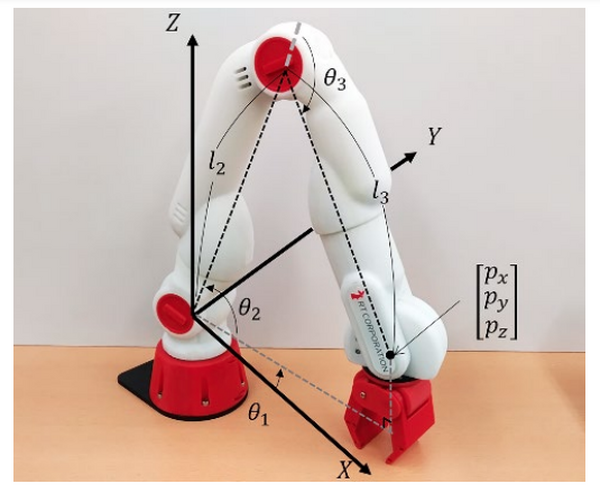
CRANE-X7はサービスロボットの教育・研究向けに開発した7軸構成のアーム型ロボット。各軸モータは電流制御が可能で、動力学に基づく制御を体感することができるようになっている。7軸構成なので冗長性があり、自由度の高さを活かして人の腕のような柔軟な動作を行うことができる。状況に応じていくつかのモータを固定することで、様々な自由度のロボットとしても実験が可能。
本体の設計においては、成人女性の腕の大きさを基準に設計し、3Dプリンタによる樹脂製で、あえて華奢なイメージの外装デザインを採用し、それによって人が近づいたり、触れることに抵抗を持ちにくい印象を演出している。肘部分の設計を工夫することで動作中の挟み込みを防止するなど、開発中の安全性にも配慮している。筐体カラーはパーツごとに6色から選択可能で、画像処理の研究で色によるマスク処理も行いやすくなっている。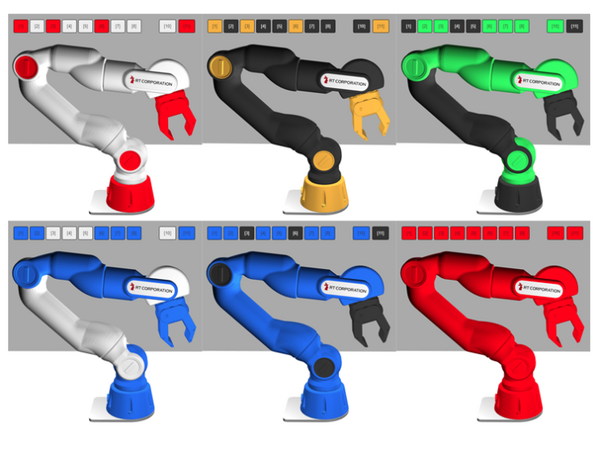
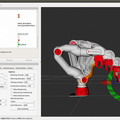
さらにCADデータなどのハードウェア情報や組み立てマニュアルを開示しているため、ユーザによる改変や修理ができるようになっている。教育研究向けのサポートとしてはC言語による逆運動学のサンプルの他、ロボット開発ミドルウェアとして近年利用者が多いROS(Kinetic, Melodic, Noetic)に対応した制御用パッケージ、制御サンプルを公開し、ユーザが ROSプログラムを容易に開発できるだけでなく、高度な処理の研究開発に応用することも支援している。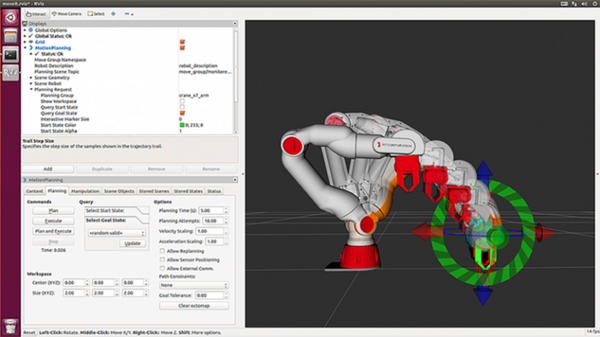
CRANE-X7をモデルとした教科書「実践ロボット制御 基礎から動力学まで」と合わせることで、アーム型ロボットの制御に関する理論を体系的に学ぶことができる。アールティは同書籍を参考に理論をプログラム実装したものを技術ブログで連載している。
CRANE-X7ホームページ
