




宇宙用汎用作業ロボットを開発するGITAI Japan株式会社は月面探査・基地開発作業を遂行可能なロボットローバーの開発に着手し、プロトタイプ1号機の地上実証に成功したことを発表した。
地上実証の動画を公開
近年米国と中国を中心に月面探査・基地開発競争が加速し、従来の人間の宇宙飛行士よりも安価で安全なロボット労働力の需要が急増している。この需要を受け、GITAIは月面で探査、採掘、点検、保守運用、宇宙組み立て等の汎用的な作業が可能なロボットローバーの開発に着手致した。そして今回、GITAI月面作業用ロボットローバーのプロトタイプ1号機の地上実証に成功し、地上実証動画を公開した。
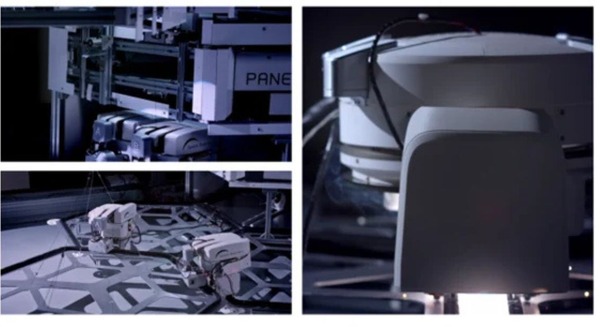
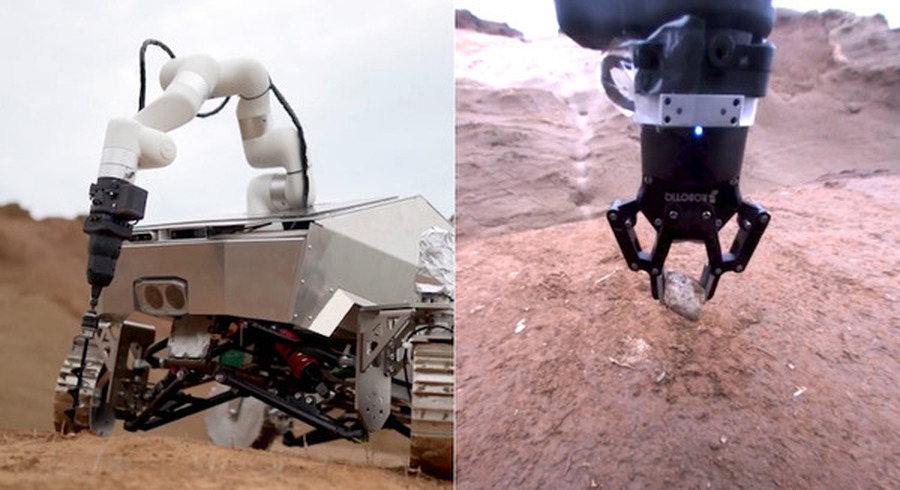
月面作業用ロボットローバーのプロトタイプ1号機
地上実証ではGITAI月面作業用ロボットローバーのプロトタイプ1号機による高速移動、不整地走行、3次元地図生成、電動ドリルによる地表採掘作業、ツールチェンジャ機能によるエンドエフェクタ切り替え(電動ドリル⇒ロボットハンド)、地中の石のサンプリング作業に挑戦し、全ての作業を遂行したことを確認した。今後更なる汎用作業性能向上・宇宙船外対策を進め、2025年中の月面実証を目指していくとしている。
地上実証動画からキャプチャ

地上実証動画からキャプチャ
【地上実証動画】
宇宙ロボットスタートアップ「GITAI」のミッション
GITAIは宇宙に安価で安全な作業手段を提供することを目指す宇宙ロボットスタートアップ。2040年には世界的な宇宙ロケット開発企業と対等なパートナーとして、月や火星に都市を建設したり宇宙コロニーを建設する安価で安全な労働力を提供することを目指している。
GITAIは以下の各宇宙領域の作業を安価・安全に遂行可能な宇宙用汎用作業ロボットの開発を進めている。
1.宇宙ステーション船内外の作業
2.軌道上サービス(衛星への寿命延長、宇宙デブリ除去)におけるドッキング・寿命延長・修理・メンテナンス作業
3.月面探査・基地開発作業
2.軌道上サービス(衛星への寿命延長、宇宙デブリ除去)におけるドッキング・寿命延長・修理・メンテナンス作業
3.月面探査・基地開発作業