



近年加速する宇宙開発において注目される分野の一つに、宇宙での組み立て作業(宇宙組み立て:In-Space Assembly)がある。打ち上げのサイズに制約がある宇宙では、狭いスペースに収まるパーツから大きな構造物を組み立てることが重要であり、ロボット技術の活用が期待されている分野だ。
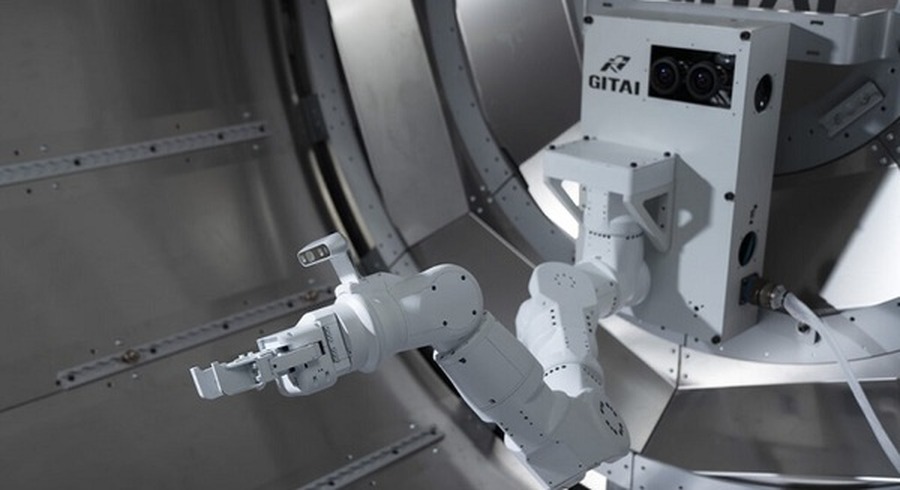
宇宙用作業代替ロボットを開発するGITAI Japan株式会社は、開発中の単腕型作業ロボットS1による宇宙組み立て作業の地上での実証実験に成功し、その動画を2020年12月15日に公開した。
■【動画】Ground experiment of in-space assembly task inside the ISS Bishop planned in 2021
地上実証実験の概要
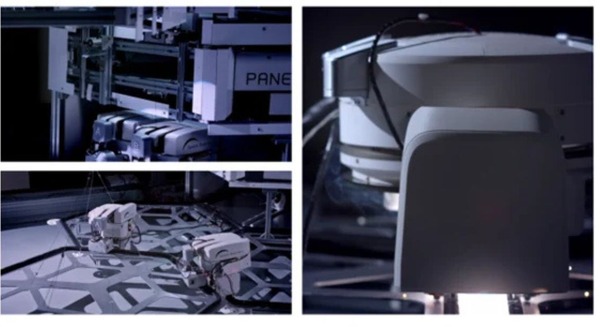
実施したタスクは柱状のパーツから架台を立ち上げ、パネル状のパーツを組み付けるもので、太陽光発電システムやアンテナ、望遠鏡のミラーなど、広い面積をもつ構造物の組み立て作業を模擬したものだ。同地上実証におけるロボットの動作は自律的で、目標の認識、動作計画などもリアルタイムに行われている。
これまでにスイッチ類の操作やケーブルの抜き差しなどの作業の自律化を行ってきたが、より複雑な作業の自律化を実現。また、技術的挑戦としてツール(ドライバ)をつかった作業も取り入れており、ロボットアームの汎用性、多能性を確認することができた。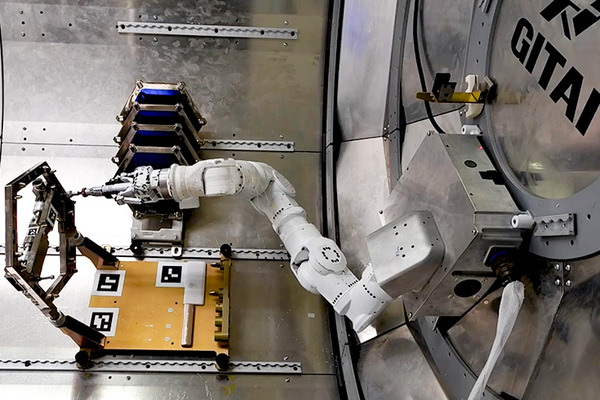
今後の展開について
各宇宙領域で需要のある作業を遂行可能なロボットを実現していくことで、宇宙での作業コストを100分の1に下げることを目指す同社は、主に、宇宙ステーション船内外の作業、軌道上サービス(衛星への燃料補給・修理、宇宙デブリ除去サービス)におけるドッキング・修理・メンテナンス作業が可能な船外ロボットアーム、月面探査・基地開発作業の各領域の汎用作業のロボット化を目指し、独自の汎用型宇宙ロボットの開発を進めている。
2021年に国際宇宙ステーション(ISS)の船内においてS1の技術実証を実施予定であり、同技術実証については、打ち上げる機体の製造や安全審査も順調に進んでいる。今回、自律的な宇宙組み立て作業の技術成立性を地上実証で確認したことにより、宇宙実証に向けて大きく前進した。なお、実施場所となる米国民間宇宙企業Nanoracks社の商用モジュールBishopは12月6日に打ち上げに成功し、すでにISSに到着している。
同社は引き続き、地球低軌道船外、さらには月面での宇宙組み立て作業についても地上での実証を目指し、宇宙における作業コストを100分の1にするというビジョンの達成のため、開発を進めていくと述べている。
GITAI関連記事(ロボスタ)
GITAI Japan株式会社